
How to analyze images with OpenCV in Genshin Impact
Today we are going to study some filters that we will use to develop our Neural Network, in order to do that, first we need to understand how to work with the single images.
The first step is load the needed libraries
import io
import cv2
import numpy as np
from IPython.display import clear_output, Image, display
import PIL.Image
from matplotlib import pyplot as plt
from numpy import load
Let us define a function that can display the images in the notebook
def showarray(a, fmt='jpeg'):
a_n = np.uint8(np.clip(a, 0, 255))
try :
f = io.BytesIO()
PIL.Image.fromarray(a_n).save(f, fmt)
display(Image(data=f.getvalue()))
except:
#a = a[:, :, ::-1] # convert image from RGB (skimage) to BGR (opencv)
# display image
plt.imshow(a)
plt.show()
Loading a Picture
We are going to take a screenshot of our gameplay and load it.
# load array
img = cv2.imread('way-day.png',1)
The first image that we will use is the following
showarray(img)

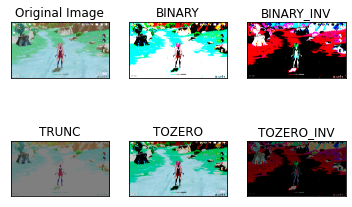
this picture is taken at noon. We are going to apply an OpenCV filter called threshold.
Simple threshold
If the pixel value is less than the threshold value, set it to 0, otherwise set it to the maximum value. The function used to set the threshold is the following:
cv.threshold(img,parameter1,parameter2,cv.type)
The first parameter is the gray level image of the source image, the second parameter is the threshold used to classify the pixel values, and the third parameter is the maximum value allocated to the pixel values beyond the threshold.
OpenCV provides different types of thresholds, which are given by the fourth parameter of the function.
import cv2 as cv
import numpy as np
from matplotlib import pyplot as plt
img = cv.imread('way-day.png',1)
ret,thresh1 = cv.threshold(img,127,255,cv.THRESH_BINARY)
ret,thresh2 = cv.threshold(img,127,255,cv.THRESH_BINARY_INV)
ret,thresh3 = cv.threshold(img,127,255,cv.THRESH_TRUNC)
ret,thresh4 = cv.threshold(img,127,255,cv.THRESH_TOZERO)
ret,thresh5 = cv.threshold(img,127,255,cv.THRESH_TOZERO_INV)
titles = ['Original Image','BINARY','BINARY_INV','TRUNC','TOZERO','TOZERO_INV']
images = [img, thresh1, thresh2, thresh3, thresh4, thresh5]
for i in range(6):
plt.subplot(2,3,i+1),plt.imshow(images[i],'gray',vmin=0,vmax=255)
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()
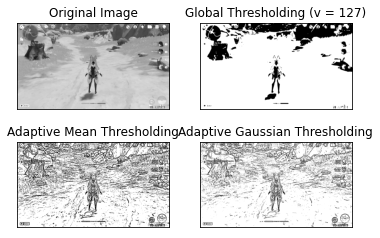
Adaptive threshold
If an image has different illumination conditions in different areas. In this case, the adaptive threshold can help, and the algorithm determines the threshold of the pixel according to the small area around the pixel. Therefore, for different regions of the same image, we get different thresholds, and for different illumination images, we get better results. In addition to the areas described above, cv.adaptiveThreshold The function also needs three other parameters.
import cv2 as cv
import numpy as np
from matplotlib import pyplot as plt
img = cv.imread('way-day.png',1)
img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
img = cv.medianBlur(img,5)
ret,th1 = cv.threshold(img,127,255,cv.THRESH_BINARY)
th2 = cv.adaptiveThreshold(img,255,cv.ADAPTIVE_THRESH_MEAN_C,\
cv.THRESH_BINARY,11,2)
th3 = cv.adaptiveThreshold(img,255,cv.ADAPTIVE_THRESH_GAUSSIAN_C,\
cv.THRESH_BINARY,11,2)
titles = ['Original Image', 'Global Thresholding (v = 127)',
'Adaptive Mean Thresholding', 'Adaptive Gaussian Thresholding']
images = [img, th1, th2, th3]
for i in range(4):
plt.subplot(2,2,i+1),plt.imshow(images[i],'gray')
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()
# load array
img = cv2.imread('way-day.png',1)
If we want to understad what is an image in terms of opencv, an image in opencv it is just a simple array, as you can see
print(img)
[[[124 193 150]
[126 196 152]
[128 195 153]
...
[131 109 82]
[128 104 76]
[128 104 77]]
[[145 198 166]
[147 198 168]
[149 198 168]
...
[128 103 76]
[126 101 72]
[126 101 72]]
[[154 199 173]
[156 199 172]
[160 199 175]
...
[124 99 70]
[124 98 68]
[124 97 68]]
...
[[161 212 222]
[161 213 222]
[160 212 221]
...
[159 210 222]
[159 209 222]
[158 209 221]]
[[158 211 222]
[158 211 222]
[160 211 222]
...
[159 210 222]
[160 210 223]
[160 210 223]]
[[158 211 221]
[158 211 221]
[159 212 222]
...
[161 212 224]
[160 211 224]
[161 211 224]]]
1. Simple threshold
The first filter that we want to deal is the Simple threshold
def process_threshold(img):
# Simple threshold
ret, processed_img = cv.threshold(img,100,255,cv.THRESH_BINARY) #night/day
return processed_img
pro_img = process_threshold(img)
showarray(pro_img)

2. Median Blur
The second filter that we want to deal is the median filter is used to suppress image noise. The edge of the signal can be protected from blurring while noise is filtered out.
def process_median(img):
# Median filter is used to suppress image noise.
processed_img = cv.medianBlur(img,9)
return processed_img
pro_img = process_median(img)
showarray(pro_img)

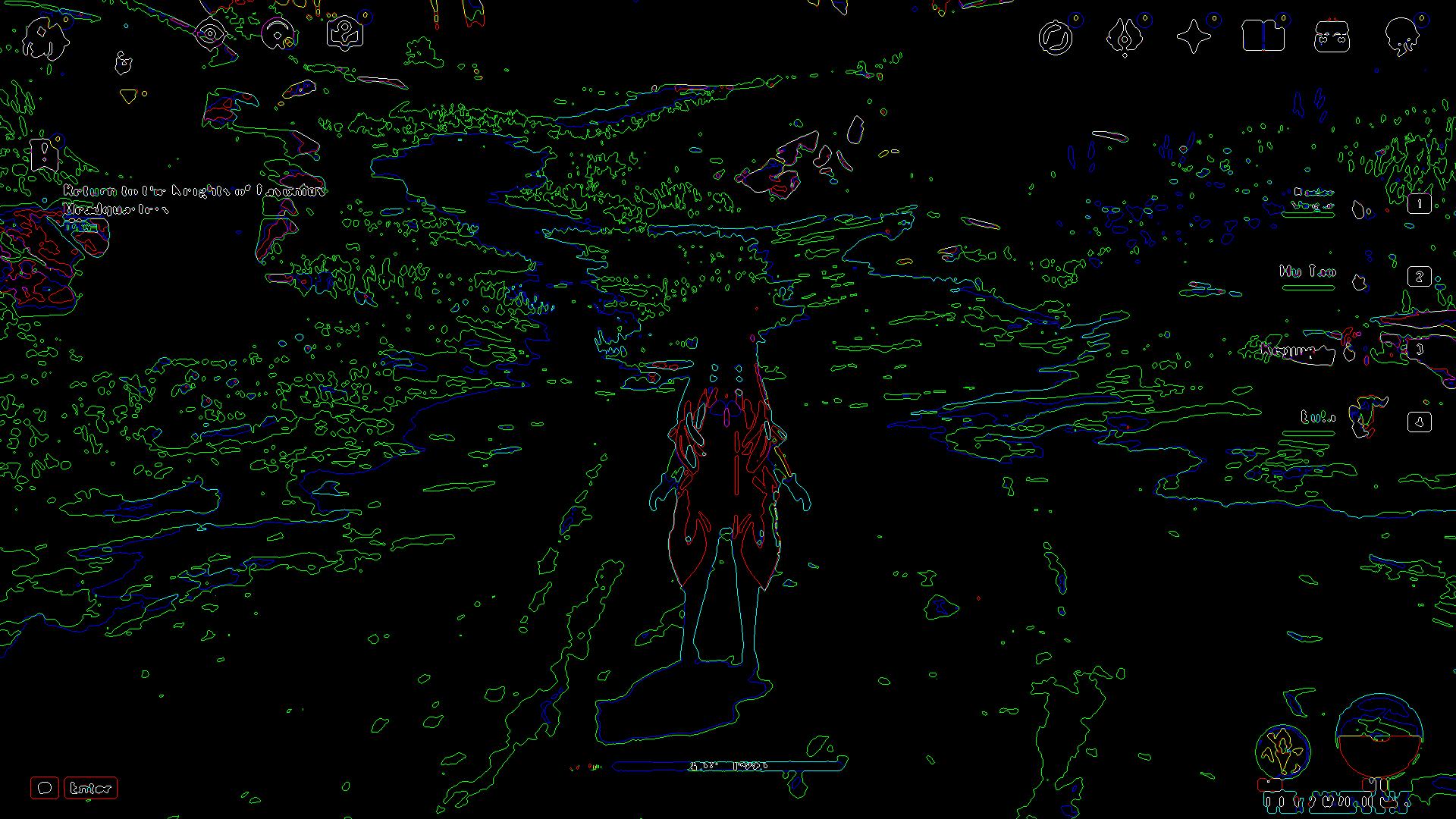
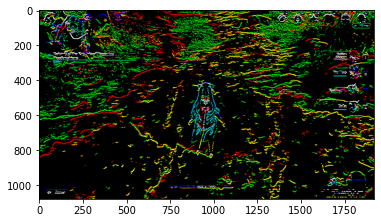
3. Edge detection
The third filter that we want to deal is the Edge detection
def process_edge(img):
# edge detection
processed_img = cv2.Sobel(img,cv2.CV_64F,0 ,1, ksize=5) #Horizontal Gradient
return processed_img
pro_img = process_edge(img)
showarray(pro_img)
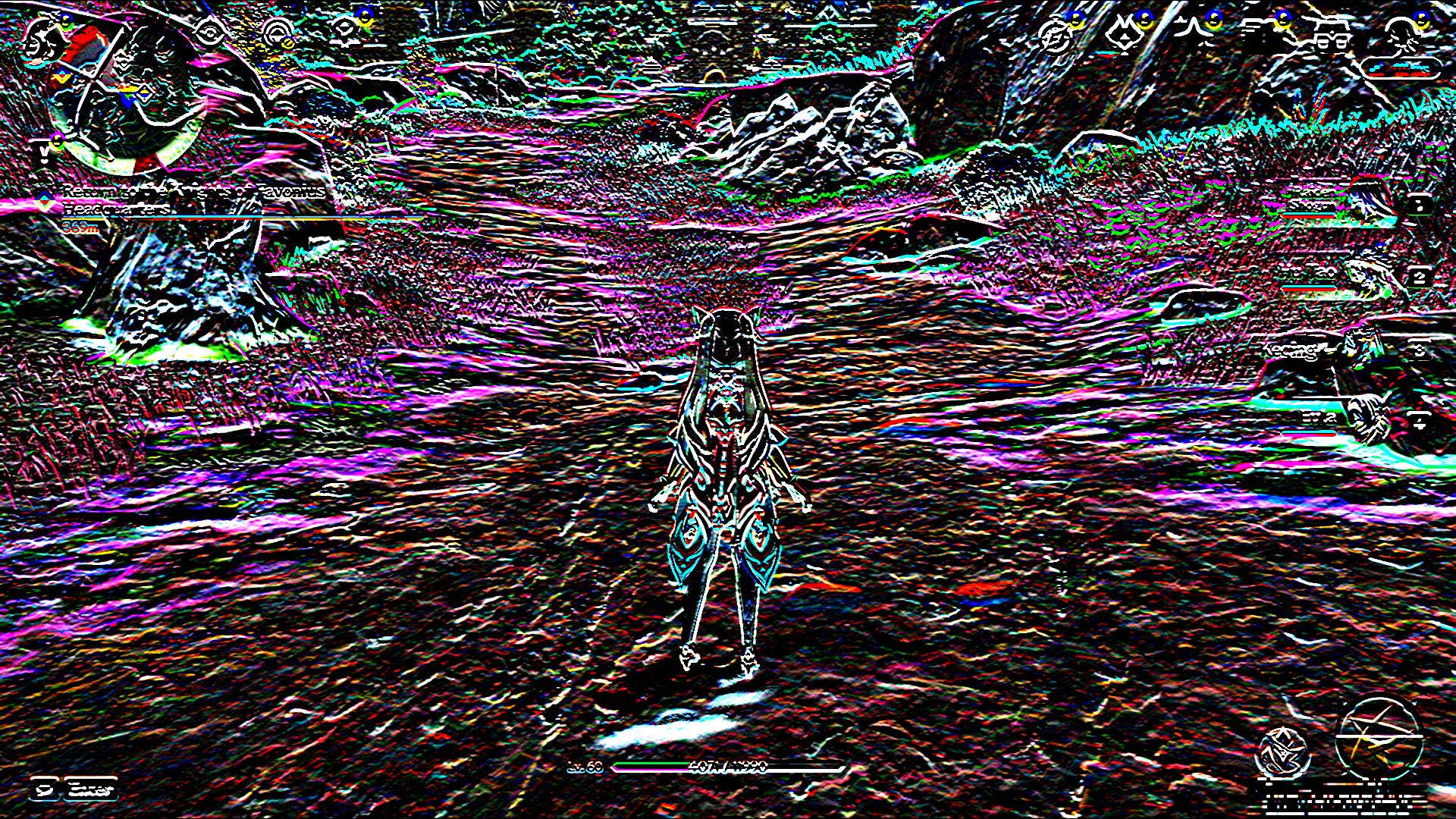
As you can see it a bit complex , how to identify a correct filter to get the appopiate filter. In addition you can mix of different filters
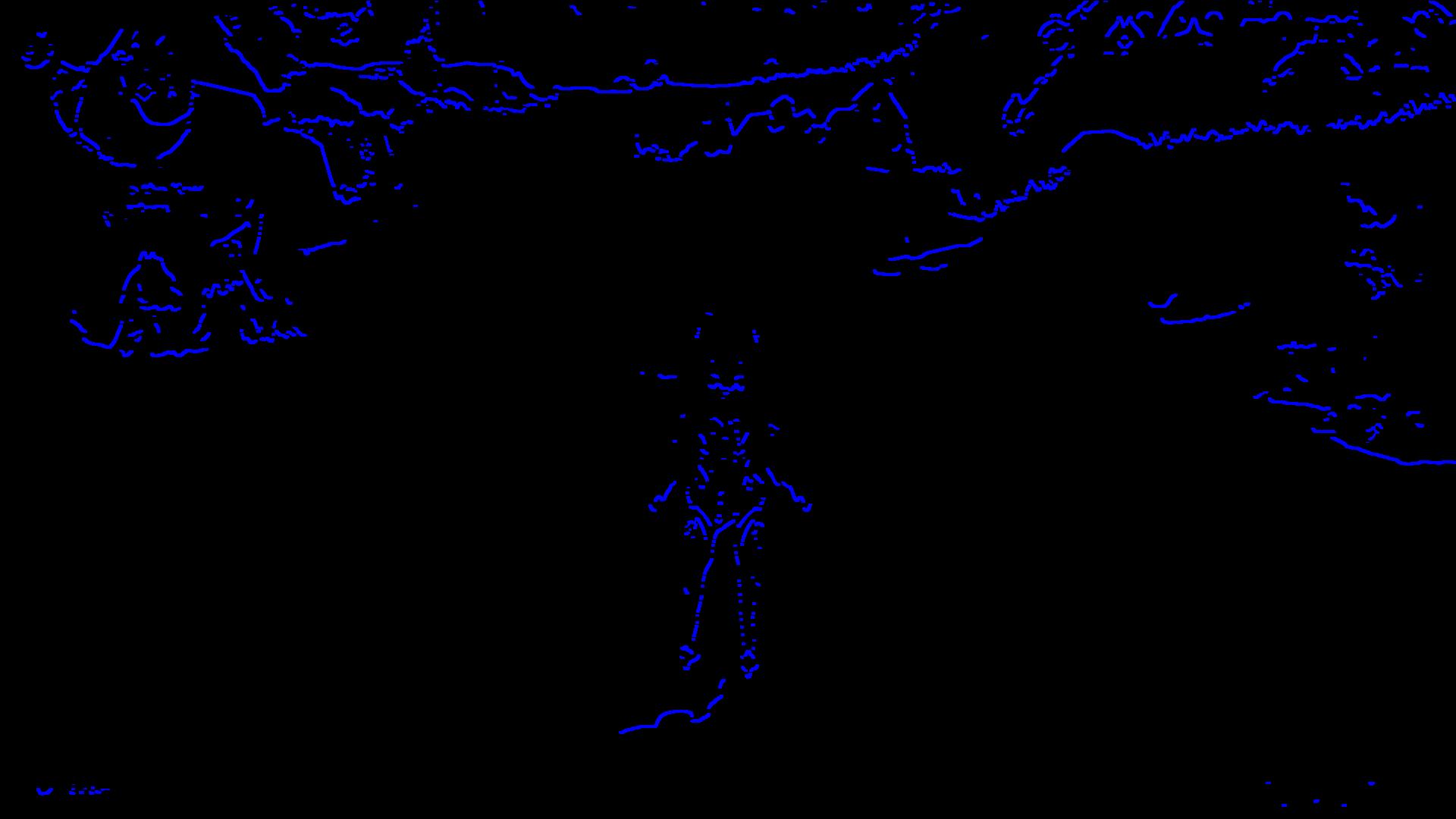
4. Median Blur+ Threshold+ Edge detection(Sobel)
def process_horizontal(img):
# Median filter is used to suppress image noise. The edge of the signal can be protected from blurring while noise is filtered out.
img = cv.medianBlur(img,9)
# Simple threshold
ret, frame = cv.threshold(img,100,255,cv.THRESH_BINARY) #night/day
# edge detection
processed_img = cv2.Sobel(frame,cv2.CV_64F,0 ,1, ksize=5) #Horizontal Gradient
return processed_img
pro_img = process_horizontal(img)
showarray(pro_img)
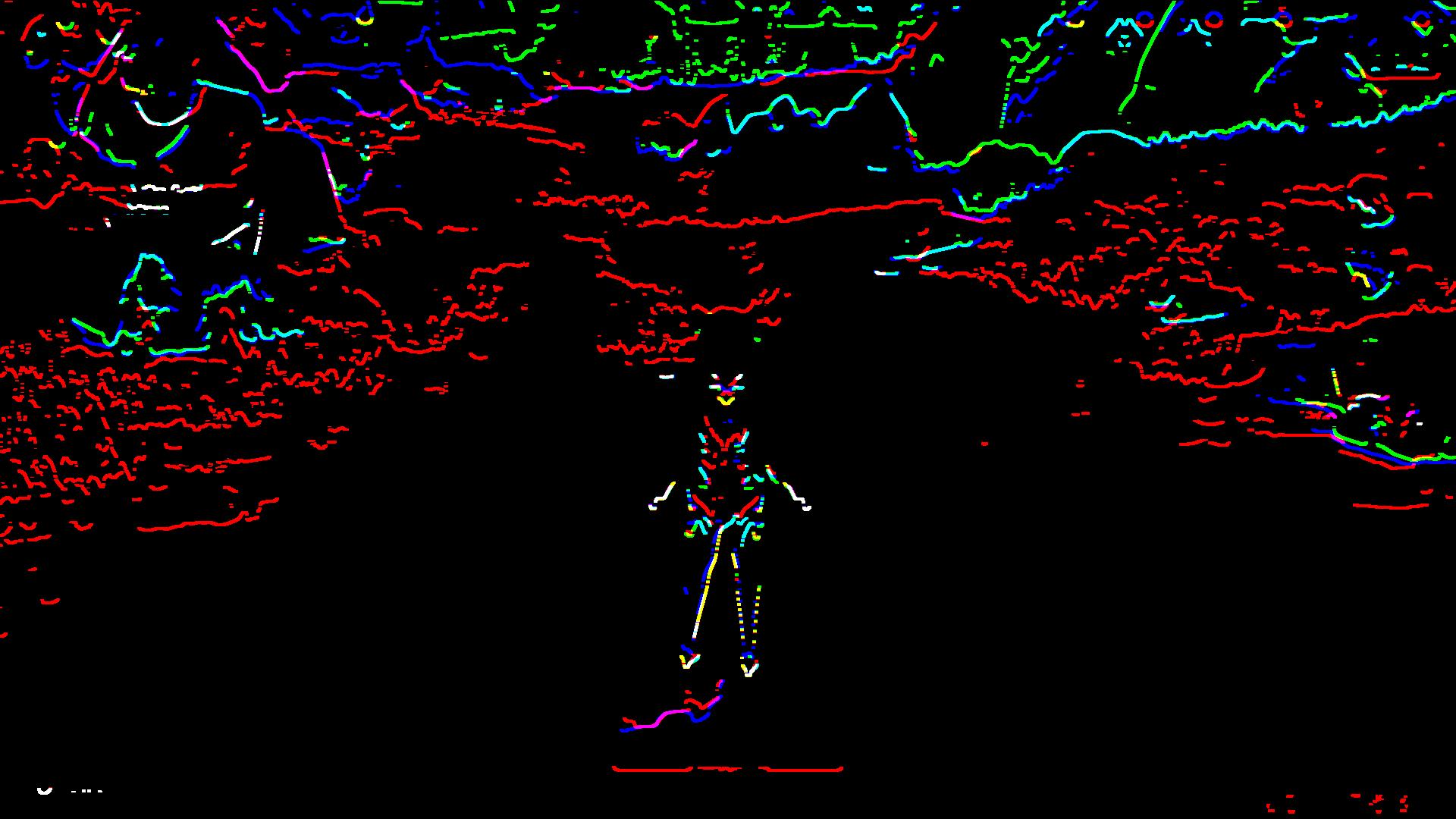
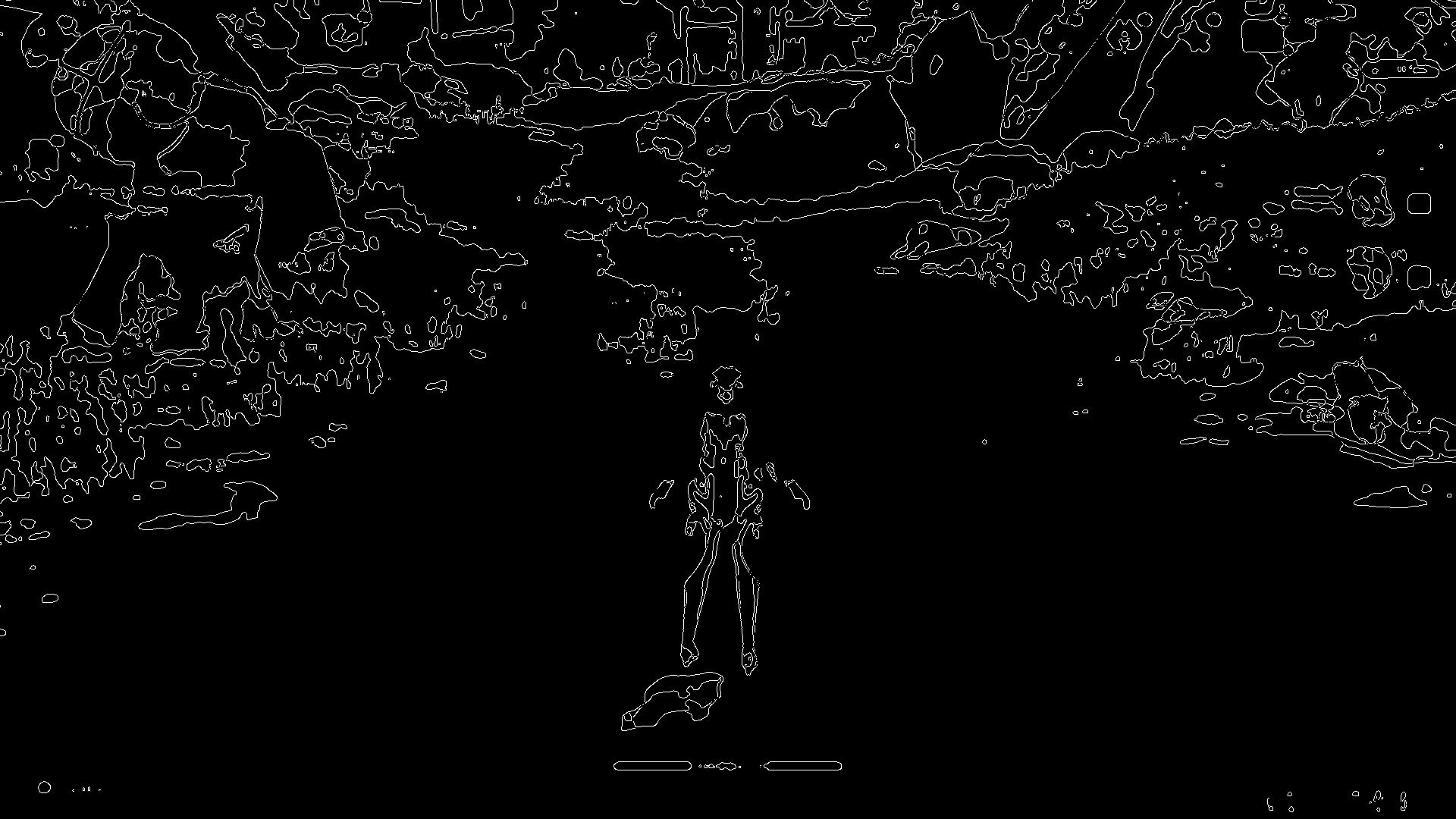
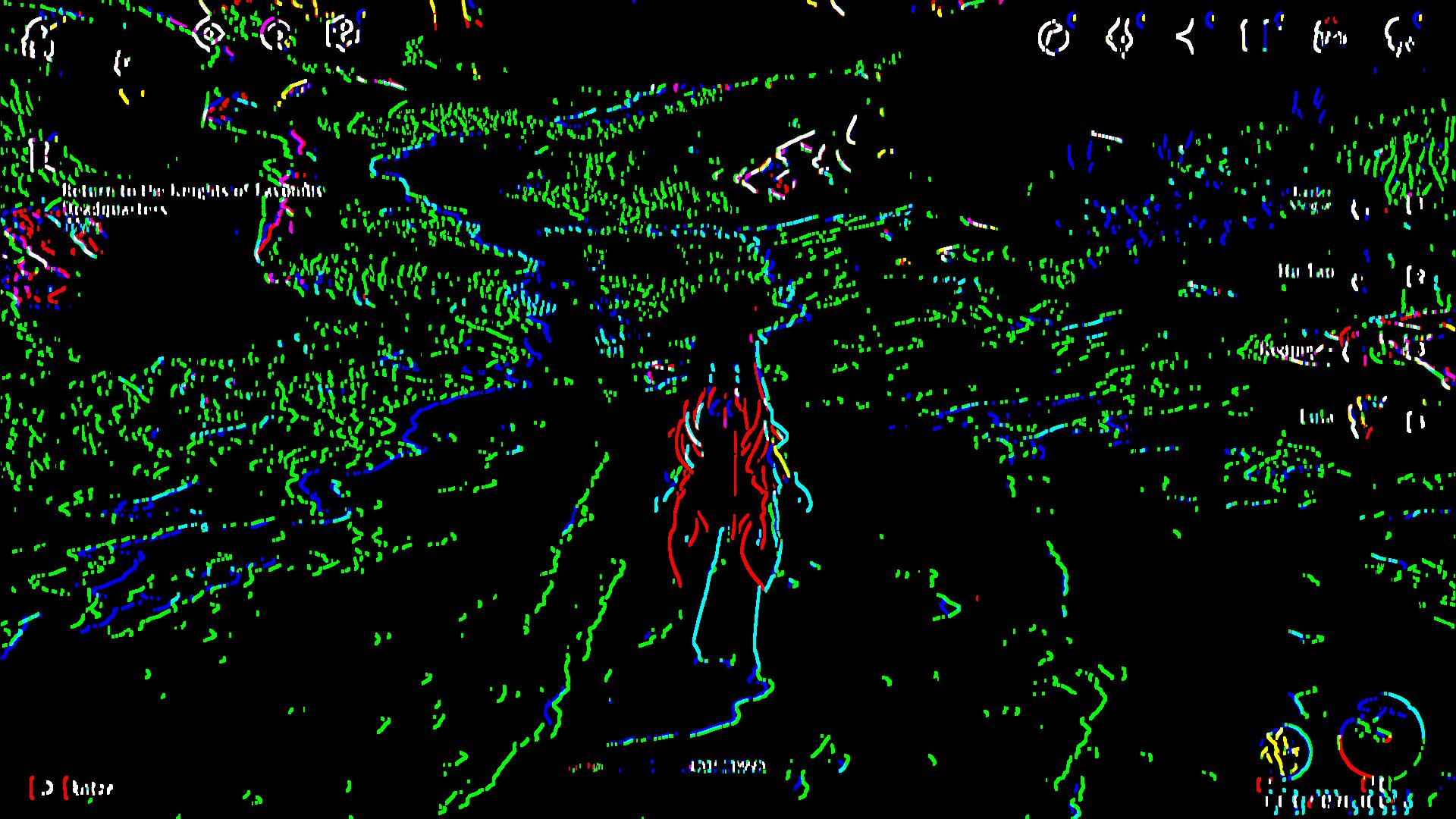
5. Median Blur+ Threshold+ Edge detection(Canny)
def process_imagen(img):
# Median filter is used to suppress image noise. The edge of the signal can be protected from blurring while noise is filtered out.
img = cv.medianBlur(img,9)
# Simple threshold
ret, frame = cv.threshold(img,100,255,cv.THRESH_BINARY) #night/day
# edge detection
processed_img = cv2.Canny(frame, threshold1 = 200, threshold2=300)
return processed_img
pro_img = process_imagen(img)
showarray(pro_img)
6. Get the red source
def process_red(img):
# Median filter is used to suppress image noise. The edge of the signal can be protected from blurring while noise is filtered out.
img = cv.medianBlur(img,5)
# Simple threshold
#ret,th1 = cv.threshold(img,121,255,cv.THRESH_BINARY) #day
#ret,th1 = cv.threshold(img,61,255,cv.THRESH_BINARY) #night
ret,th1 = cv.threshold(img,100,255,cv.THRESH_BINARY) #night/day
frame=th1
y= cv2.Sobel(frame,cv2.CV_64F,0 ,1, ksize=5) #Horizontal Gradient
#edge= cv2.Canny(frame, 100, 200)#Edge Detection
src =y
#print(src.shape)
# extract red channel
red_channel = src[:,:,2]
# create empty image with same shape as that of src image
red_img = np.zeros(src.shape)
#assign the red channel of src to empty image
red_img[:,:,2] = red_channel
return red_img
red_img = process_red(img)
showarray(red_img)
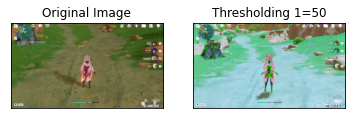
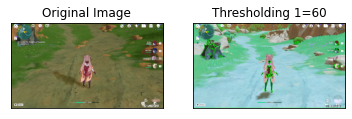
8. Find the best Thresholding parameter
As you could see there are some parameters that you have to add to the filter that you can identify by doing a loop with different values of Thresholding paramter
import cv2 as cv
import numpy as np
from matplotlib import pyplot as plt
img = cv.imread('day.png',0)
#img= cv.imread('night.png',1)
# convert to gray
#img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# Median filter is used to suppress image noise. The edge of the signal can be protected from blurring while noise is filtered out.
img = cv.medianBlur(img,5)
# Simple threshold
lst = [i for i in range(1,200+20,20)]
for x in lst:
ret,th1 = cv.threshold(img,x,255,cv.THRESH_BINARY)
plt.imshow(th1,'gray')
titles = ['Original Image', 'Global Thresholding v='+str(x)]
images = [img, th1]
for i in range(2):
plt.subplot(1,2,i+1),plt.imshow(images[i],'gray')
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()
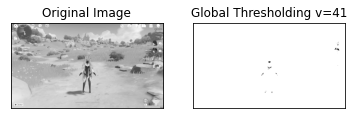
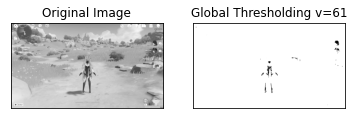
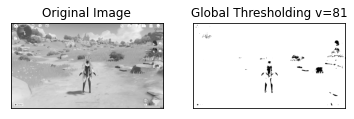
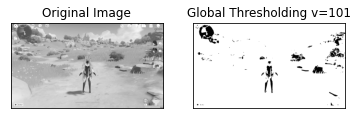
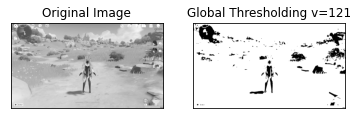
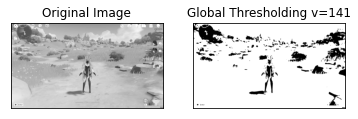
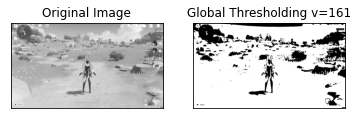
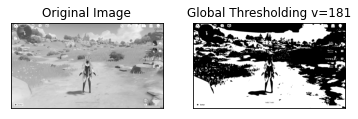
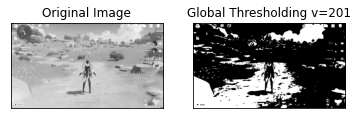
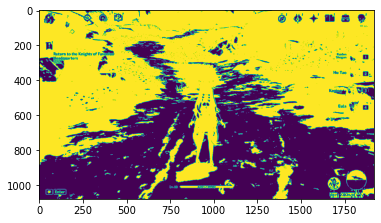
From the previous analysis we could identify that at v=200 you can identify the way of the game during the day
import cv2 as cv
import numpy as np
from matplotlib import pyplot as plt
frame= cv.imread('way-day.png',1)
# Median filter is used to suppress image noise. The edge of the signal can be protected from blurring while noise is filtered out.
frame = cv.medianBlur(frame,5)
# Simple threshold
ret,frame = cv.threshold(frame,200,255,cv.THRESH_BINARY)
plt.imshow(frame,'gray')
<matplotlib.image.AxesImage at 0x2bbbbff0c50>
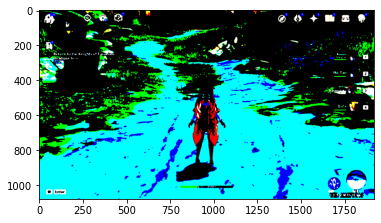
As you see in the previous picture, the path is depicted with the cyan color.
We can test this output with different filters
a= cv2.Laplacian(frame,cv2.CV_64F) #Laplacian
x= cv2.Sobel(frame,cv2.CV_64F,1 ,0, ksize=5)#Vertical Gradient
y= cv2.Sobel(frame,cv2.CV_64F,0 ,1, ksize=5) #Horizontal Gradient
edge= cv2.Canny(frame, 200, 200)#Edge Detection
showarray(a)
showarray(x)
showarray(y)
showarray(edge)


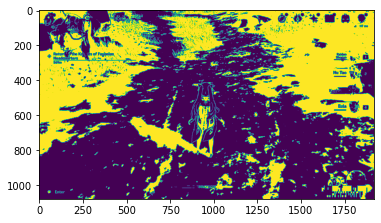
NIGHT WAY IDENTIFICATION
For the night unfortunatelly the filters does not match as the day ones. So we need to find new parameters for the night. At the end we should develop a function that find the best threshold parameter depending the weather conditions.
import cv2 as cv
import numpy as np
from matplotlib import pyplot as plt
from numpy import load
# load array
img = cv.imread('way-night.png',1)
showarray(img)

The first thing that want to do is identify the way where you are walking. So first we need to identify it
9 K-means color quantization
Let is use a method to reduce the number of colors of the picture by using the color quantization procedure
import cv2
import numpy as np
def kmeans_color_quantization(image, clusters=4, rounds=1):
h, w = image.shape[:2]
samples = np.zeros([h*w,3], dtype=np.float32)
count = 0
for x in range(h):
for y in range(w):
samples[count] = image[x][y]
count += 1
compactness, labels, centers = cv2.kmeans(samples,
clusters,
None,
(cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 10000, 0.0001),
rounds,
cv2.KMEANS_RANDOM_CENTERS)
centers = np.uint8(centers)
res = centers[labels.flatten()]
return res.reshape((image.shape))
image = cv2.imread('way-night.png')
result = kmeans_color_quantization(image, clusters=4)
showarray(result)
#cv2.imshow('result', result)
#cv2.waitKey()

# declare lists
numbers = []
cubes = []
# start and end numbers
start = 1
end = 10
# run a loop from start to end+1
for count in range (start, end+1) :
numbers.append (count)
cubes.append (count**3)
# print the lists
print("numbers: ",numbers)
print("cubes : ",cubes)
numbers: [1, 2, 3, 4, 5, 6, 7, 8, 9, 10]
cubes : [1, 8, 27, 64, 125, 216, 343, 512, 729, 1000]
9. Reduce color space
Let us consider reduction to 8 colors
import numpy as np
import cv2 as cv
def is_cube(n):
cbrt = np.cbrt(n)
return cbrt ** 3 == n, int(cbrt)
def reduce_color_space(img, n_colors=8):
n_valid, cbrt = is_cube(n_colors)
if not n_valid:
print("n_colors should be a perfect cube")
return
n_bits = int(np.log2(cbrt))
if n_bits > 8:
print("Can't generate more colors")
return
bitmask = int(f"{'1' * n_bits}{'0' * (8 - n_bits)}", 2)
return img & bitmask
img = cv.imread("way-night.png")
img_reduced=reduce_color_space(img)
showarray(img_reduced)
#cv.imshow("orig", img)
#cv.imshow("reduced", reduce_color_space(img))
#cv2.waitKey(0)
#cv2.destroyAllWindows()

10. Color reduction with sklearn
# import the necessary packages
from sklearn.cluster import MiniBatchKMeans
import numpy as np
import argparse
import cv2
# load the image and grab its width and height
image = cv2.imread('way-night.png')
#image = cv2.imread('way-day.png')
(h, w) = image.shape[:2]
convert the image from the RGB color space to the Lab* color space – since we will be clustering using k-means which is based on the euclidean distance, we’ll use the Lab* color space where the euclidean distance implies perceptual meaning
image = cv2.cvtColor(image, cv2.COLOR_BGR2LAB)
# reshape the image into a feature vector so that k-means
# can be applied
image = image.reshape((image.shape[0] * image.shape[1], 3))
clusters=4
# apply k-means using the specified number of clusters and
# then create the quantized image based on the predictions
clt = MiniBatchKMeans(n_clusters = clusters)
labels = clt.fit_predict(image)
quant = clt.cluster_centers_.astype("uint8")[labels]
# reshape the feature vectors to images
quant = quant.reshape((h, w, 3))
image = image.reshape((h, w, 3))
# convert from L*a*b* to RGB
quant = cv2.cvtColor(quant, cv2.COLOR_LAB2BGR)
image = cv2.cvtColor(image, cv2.COLOR_LAB2BGR)
showarray(np.hstack([image, quant]))
# display the images and wait for a keypress
#cv2.imshow("image", np.hstack([image, quant]))
#cv2.waitKey(0)
from skimage import io
from sklearn.cluster import KMeans, MiniBatchKMeans
import numpy as np
import time
import sys
def _extract_features(img):
h, w, ch = img.shape
features = img.reshape((h*w, ch))
return features
def _clusterize(colors, n_clusters):
t = time.time()
kmeans = MiniBatchKMeans(n_clusters=n_clusters,
random_state=0,
batch_size=2**12).fit(colors)
print('Time to clusterize: {} s'.format(time.time() - t))
return kmeans.labels_, kmeans.cluster_centers_
def _reduce_colors(output_shape, labels, labels_colors):
out = np.zeros((labels.size, 3))
for label, color in enumerate(labels_colors):
out[labels == label] = color
out = out.reshape(output_shape).astype(np.uint8)
return out
#img = io.imread(input_path).astype(np.float32)
img = cv2.imread('way-night.png')
colors = _extract_features(img)
n_colors=3
labels, labels_colors = _clusterize(colors, n_colors)
Time to clusterize: 0.14699697494506836 s
out = _reduce_colors(img.shape, labels, labels_colors)
type(out)
numpy.ndarray
showarray(out)

from skimage import io
from sklearn.cluster import KMeans, MiniBatchKMeans
import numpy as np
import time
import sys
def _extract_features(img):
h, w, ch = img.shape
features = img.reshape((h*w, ch))
return features
def _clusterize(colors, n_clusters):
t = time.time()
kmeans = MiniBatchKMeans(n_clusters=n_clusters,
random_state=0,
batch_size=2**12).fit(colors)
print('Time to clusterize: {} s'.format(time.time() - t))
return kmeans.labels_, kmeans.cluster_centers_
def _reduce_colors(output_shape, labels, labels_colors):
out = np.zeros((labels.size, 3))
for label, color in enumerate(labels_colors):
out[labels == label] = color
out = out.reshape(output_shape).astype(np.uint8)
return out
def color_quantization(img, n_colors=3):
colors = _extract_features(img)
labels, labels_colors = _clusterize(colors, n_colors)
out = _reduce_colors(img.shape, labels, labels_colors)
return out
img = cv2.imread('way-night.png')
img_quantized=color_quantization(img)
Time to clusterize: 0.14100027084350586 s
showarray(img_quantized)

#cv2.imshow("Red Image", imm)
#cv2.waitKey(0)
#cv2.destroyAllWindows()
import cv2
import numpy as np
img = cv2.imread('way-night.png')
def process(img):
img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
_, thresh = cv2.threshold(img_gray, 128, 255, cv2.THRESH_BINARY)
img_blur = cv2.GaussianBlur(thresh, (5, 5), 2)
img_canny = cv2.Canny(img_blur, 0, 0)
return img_canny
def get_contours(img):
contours, _ = cv2.findContours(process(img), cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)
r1, r2 = sorted(contours, key=cv2.contourArea)[-3:-1]
x, y, w, h = cv2.boundingRect(np.r_[r1, r2])
cv2.rectangle(img, (x, y), (x + w, y + h), (0, 0, 255), 2)
get_contours(img)
#cv2.imshow("img_processed", img)
#cv2.waitKey(0)
#cv2.destroyAllWindows()
import cv2
def process(img):
img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
_, thresh = cv2.threshold(img_gray, 163, 255, cv2.THRESH_BINARY)
img_canny = cv2.Canny(thresh, 0, 0)
img_dilate = cv2.dilate(img_canny, None, iterations=7)
return cv2.erode(img_dilate, None, iterations=7)
def get_contours(img):
contours, _ = cv2.findContours(process(img), cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)
x, y, w, h = cv2.boundingRect(max(contours, key=cv2.contourArea))
cv2.rectangle(img, (x, y), (x + w, y + h), (0, 0, 255), 2)
img = cv2.imread('way-night.png')
get_contours(img)
#cv2.imshow("img_processed", img)
#cv2.waitKey(0)
#cv2.destroyAllWindows()
showarray(img)

def process_horizontal(img):
# Median filter is used to suppress image noise. The edge of the signal can be protected from blurring while noise is filtered out.
#img = cv2.medianBlur(img,1)
# Simple threshold
ret, frame = cv2.threshold(img,100,100,cv2.THRESH_BINARY) #night/day
# edge detection
processed_img = cv2.Sobel(frame,cv2.CV_64F,0 ,1, ksize=5) #Horizontal Gradient
return processed_img
img = cv2.imread('way-night.png')
pro_img = process_horizontal(img)
#cv2.imshow("img_processed", pro_img)
#cv2.waitKey(0)
#cv2.destroyAllWindows()
showarray(pro_img)
Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).
import cv2
# read the image
image = cv2.imread('way-day.png')
# B, G, R channel splitting
blue, green, red = cv2.split(image)
# detect contours using blue channel and without thresholding
contours1, hierarchy1 = cv2.findContours(image=blue, mode=cv2.RETR_TREE, method=cv2.CHAIN_APPROX_NONE)
# draw contours on the original image
image_contour_blue = image.copy()
cv2.drawContours(image=image_contour_blue, contours=contours1, contourIdx=-1, color=(0, 255, 0), thickness=2, lineType=cv2.LINE_AA)
# see the results
print('Contour detection using blue channels only')
showarray(image_contour_blue)
#cv2.imshow('Contour detection using blue channels only', image_contour_blue)
#cv2.waitKey(0)
#cv2.imwrite('blue_channel.jpg', image_contour_blue)
#cv2.destroyAllWindows()
# detect contours using green channel and without thresholding
contours2, hierarchy2 = cv2.findContours(image=green, mode=cv2.RETR_TREE, method=cv2.CHAIN_APPROX_NONE)
# draw contours on the original image
image_contour_green = image.copy()
cv2.drawContours(image=image_contour_green, contours=contours2, contourIdx=-1, color=(0, 255, 0), thickness=2, lineType=cv2.LINE_AA)
# see the results
print('Contour detection using green channels only')
showarray(image_contour_green)
#cv2.imshow('Contour detection using green channels only', image_contour_green)
#cv2.waitKey(0)
#cv2.imwrite('green_channel.jpg', image_contour_green)
#cv2.destroyAllWindows()
# detect contours using red channel and without thresholding
contours3, hierarchy3 = cv2.findContours(image=red, mode=cv2.RETR_TREE, method=cv2.CHAIN_APPROX_NONE)
# draw contours on the original image
image_contour_red = image.copy()
cv2.drawContours(image=image_contour_red, contours=contours3, contourIdx=-1, color=(0, 255, 0), thickness=2, lineType=cv2.LINE_AA)
# see the results
print('Contour detection using red channels only')
#cv2.imshow('Contour detection using red channels only', image_contour_red)
#cv2.waitKey(0)
#cv2.imwrite('red_channel.jpg', image_contour_red)
#cv2.destroyAllWindows()
showarray(image_contour_red)
Contour detection using blue channels only

Contour detection using green channels only

Contour detection using red channels only

# to actually visualize the effect of `CHAIN_APPROX_SIMPLE`, we need a proper image
# read the image
image1 = cv2.imread('way-night.png')
img_gray1 = cv2.cvtColor(image1, cv2.COLOR_BGR2GRAY)
ret, thresh1 = cv2.threshold(img_gray1, 150, 255, cv2.THRESH_BINARY)
contours2, hierarchy2 = cv2.findContours(thresh1, cv2.RETR_TREE,
cv2.CHAIN_APPROX_SIMPLE)
image_copy2 = image1.copy()
cv2.drawContours(image_copy2, contours2, -1, (0, 255, 0), 2, cv2.LINE_AA)
#IMPLE Approximation contours
showarray(image_copy2)
#cv2.imshow('SIMPLE Approximation contours', image_copy2)
#cv2.waitKey(0)
#cv2.destroyAllWindows()
image_copy3 = image1.copy()
for i, contour in enumerate(contours2): # loop over one contour area
for j, contour_point in enumerate(contour): # loop over the points
# draw a circle on the current contour coordinate
cv2.circle(image_copy3, ((contour_point[0][0], contour_point[0][1])), 2, (0, 255, 0), 2, cv2.LINE_AA)
showarray(image_copy3)


# see the results
print('CHAIN_APPROX_SIMPLE Point only')
showarray(image_copy3)
#cv2.imshow('CHAIN_APPROX_SIMPLE Point only', image_copy3)
#cv2.waitKey(0)
#cv2.imwrite('contour_point_simple.jpg', image_copy3)
#cv2.destroyAllWindows()
CHAIN_APPROX_SIMPLE Point only

def contour_search(image1):
img_gray1 = cv2.cvtColor(image1, cv2.COLOR_BGR2GRAY)
ret, thresh1 = cv2.threshold(img_gray1, 100, 255, cv2.THRESH_BINARY)
contours2, hierarchy2 = cv2.findContours(thresh1, cv2.RETR_TREE,
cv2.CHAIN_APPROX_SIMPLE)
image_copy2 = image1.copy()
cv2.drawContours(image_copy2, contours2, -1, (0, 255, 0), 2, cv2.LINE_AA)
return image_copy2
image_copy2=contour_search(image1)
print('SIMPLE Approximation contours')
showarray(image_copy2)
#cv2.imshow('SIMPLE Approximation contours', image_copy2)
#cv2.waitKey(0)
#cv2.destroyAllWindows()
SIMPLE Approximation contours

def contour_find(image1,parameter1, parameter2):
img_gray1 = cv2.cvtColor(image1, cv2.COLOR_BGR2GRAY)
ret, thresh1 = cv2.threshold(img_gray1, parameter1, parameter2, cv2.THRESH_BINARY)
contours2, hierarchy2 = cv2.findContours(thresh1, cv2.RETR_TREE,
cv2.CHAIN_APPROX_SIMPLE)
image_copy2 = image1.copy()
cv2.drawContours(image_copy2, contours2, -1, (0, 255, 0), 2, cv2.LINE_AA)
return image_copy2
image1 = cv2.imread('way-day.png')
# Median filter is used to suppress image noise. The edge of the signal can be protected from blurring while noise is filtered out.
image1 = cv.medianBlur(image1,5)
image_copy2=contour_find(image1,100,255)
print('SIMPLE Approximation contours')
showarray(image_copy2)
#cv2.imshow('SIMPLE Approximation contours', image_copy2)
#cv2.waitKey(0)
#cv2.destroyAllWindows()
SIMPLE Approximation contours

import cv2 as cv
import numpy as np
from matplotlib import pyplot as plt
# Simple threshold
lst = [i for i in range(50,150+1,5)]
img1 = cv2.imread('way-night.png')
for x in lst:
th1=contour_find(image1,x,255)
plt.imshow(th1,'gray')
titles = ['Original Image', 'Thresholding 1='+str(x)]
images = [img, th1]
for i in range(2):
plt.subplot(1,2,i+1),plt.imshow(images[i],'gray')
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()
import cv2
image = cv2.imread('way-day.png')
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
thresh = cv2.threshold(gray,200, 255,cv2.THRESH_BINARY_INV)[1]
cnts, h = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
label = '1'
count = 0
# Get inner list of hierarchy
for layer in zip(cnts, h[0]):
contour = layer[0]
hierarchy = layer[1]
# If we find new contour (not inner) reset label
if hierarchy[1] >= 0:
label = '1'
# Ensure that we only have outer contour
if count % 2 == 0:
cv2.drawContours(image, [contour], -1, (36, 255, 12), 2)
x,y,w,h = cv2.boundingRect(contour)
cv2.putText(image, label, (x +50,y+ 70), cv2.FONT_HERSHEY_SIMPLEX, 0.7, (36,255,12), 3)
label = str(int(label) * -1)
count += 1
print('thresh')
showarray(thresh)
print('image')
showarray(image)
#cv2.imshow('thresh', thresh)
#cv2.imshow('image', image)
#cv2.waitKey()
#cv2.destroyAllWindows()
thresh
image

import cv2
image = cv2.imread('way-night.png')
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
thresh = cv2.threshold(gray,90, 255,cv2.THRESH_BINARY_INV)[1]
cnts, h = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
label = '1'
count = 0
# Get inner list of hierarchy
for layer in zip(cnts, h[0]):
contour = layer[0]
hierarchy = layer[1]
# If we find new contour (not inner) reset label
if hierarchy[1] >= 0:
label = '1'
# Ensure that we only have outer contour
if count % 2 == 0:
cv2.drawContours(image, [contour], -1, (36, 255, 12), 2)
x,y,w,h = cv2.boundingRect(contour)
cv2.putText(image, label, (x +50,y+ 70), cv2.FONT_HERSHEY_SIMPLEX, 0.7, (36,255,12), 3)
label = str(int(label) * -1)
count += 1
print('thresh')
showarray(thresh)
print('image')
showarray(image)
#cv2.imshow('thresh', thresh)
#cv2.imshow('image', image)
#cv2.waitKey()
#cv2.destroyAllWindows()
thresh
image

Analysis of the day
import cv2 as cv
import numpy as np
from matplotlib import pyplot as plt
#img = cv.imread('noisy2.png',0)
#img = load('data.npy') #Original
img = cv2.imread('way-day.png')
#img = cv2.imread('way-night.png')
img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# global thresholding
#ret1,th1 = cv.threshold(img,127,255,cv.THRESH_BINARY)
ret1,th1 = cv.threshold(img,200,255,cv.THRESH_BINARY) # day
#ret1,th1 = cv.threshold(img,90,255,cv.THRESH_BINARY) # night
# Otsu's thresholding
ret2,th2 = cv.threshold(img,0,255,cv.THRESH_BINARY+cv.THRESH_OTSU)
# Otsu's thresholding after Gaussian filtering
blur = cv.GaussianBlur(img,(5,5),0)
# The threshold must be set to 0.
ret3,th3 = cv.threshold(blur,0,255,cv.THRESH_BINARY+cv.THRESH_OTSU)
# plot all the images and their histograms
images = [img, 0, th1,
img, 0, th2,
blur, 0, th3]
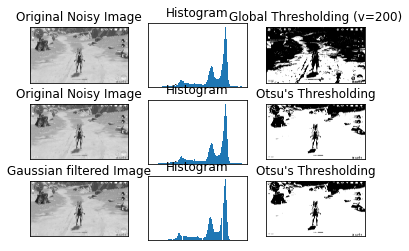
titles = ['Original Noisy Image','Histogram','Global Thresholding (v=200)',
'Original Noisy Image','Histogram',"Otsu's Thresholding",
'Gaussian filtered Image','Histogram',"Otsu's Thresholding"]
Filter of Day v=200 with Day Image
for i in range(3):
plt.subplot(3,3,i*3+1),plt.imshow(images[i*3],'gray')
plt.title(titles[i*3]), plt.xticks([]), plt.yticks([])
plt.subplot(3,3,i*3+2),plt.hist(images[i*3].ravel(),256)
plt.title(titles[i*3+1]), plt.xticks([]), plt.yticks([])
plt.subplot(3,3,i*3+3),plt.imshow(images[i*3+2],'gray')
plt.title(titles[i*3+2]), plt.xticks([]), plt.yticks([])
#plt.hist(images[3].ravel(),256)
for i in range(1):
plt.hist(images[3].ravel(),256)
len(images[3].ravel())
2073600
showarray(images[3])
images[3]
array([[172, 175, 175, ..., 103, 98, 99],
[182, 183, 183, ..., 98, 95, 95],
[186, 186, 187, ..., 93, 92, 91],
...,
[209, 210, 209, ..., 208, 207, 207],
[208, 208, 208, ..., 208, 208, 208],
[208, 208, 209, ..., 210, 209, 209]], dtype=uint8)
plt.hist(images[3].ravel())
(array([ 2439., 18295., 60282., 164733., 100166., 88087., 455993.,
488123., 668348., 27134.]),
array([ 1. , 26.4, 51.8, 77.2, 102.6, 128. , 153.4, 178.8, 204.2,
229.6, 255. ]),
<BarContainer object of 10 artists>)
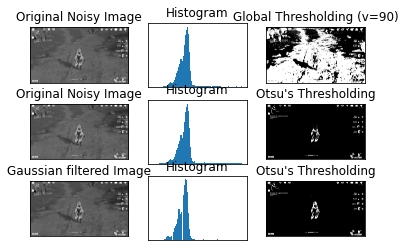
Analysis of the night
import cv2 as cv
import numpy as np
from matplotlib import pyplot as plt
#img = cv.imread('noisy2.png',0)
#img = load('data.npy') #Original
#img = cv2.imread('way-day.png')
img = cv2.imread('way-night.png')
img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# global thresholding
#ret1,th1 = cv.threshold(img,127,255,cv.THRESH_BINARY)
#ret1,th1 = cv.threshold(img,200,255,cv.THRESH_BINARY) # day
ret1,th1 = cv.threshold(img,90,255,cv.THRESH_BINARY) # night
# Otsu's thresholding
ret2,th2 = cv.threshold(img,0,255,cv.THRESH_BINARY+cv.THRESH_OTSU)
# Otsu's thresholding after Gaussian filtering
blur = cv.GaussianBlur(img,(5,5),0)
# The threshold must be set to 0.
ret3,th3 = cv.threshold(blur,0,255,cv.THRESH_BINARY+cv.THRESH_OTSU)
# plot all the images and their histograms
images = [img, 0, th1,
img, 0, th2,
blur, 0, th3]
titles = ['Original Noisy Image','Histogram','Global Thresholding (v=90)',
'Original Noisy Image','Histogram',"Otsu's Thresholding",
'Gaussian filtered Image','Histogram',"Otsu's Thresholding"]
Filter of Night v=90 with Night Image
for i in range(3):
plt.subplot(3,3,i*3+1),plt.imshow(images[i*3],'gray')
plt.title(titles[i*3]), plt.xticks([]), plt.yticks([])
plt.subplot(3,3,i*3+2),plt.hist(images[i*3].ravel(),256)
plt.title(titles[i*3+1]), plt.xticks([]), plt.yticks([])
plt.subplot(3,3,i*3+3),plt.imshow(images[i*3+2],'gray')
plt.title(titles[i*3+2]), plt.xticks([]), plt.yticks([])
plt.show()
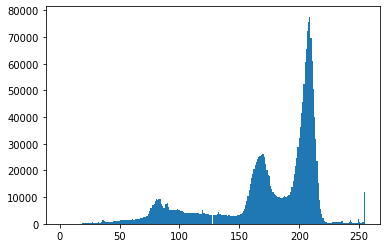
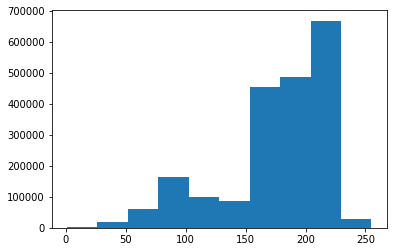
Analysis of the Picture
Spectrum Analysis
img = cv2.imread('way-day.png')
img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
oned=img.ravel()
for i in range(1):
plt.hist(oned,256)
plt.hist(oned)
(array([ 2439., 18295., 60282., 164733., 100166., 88087., 455993.,
488123., 668348., 27134.]),
array([ 1. , 26.4, 51.8, 77.2, 102.6, 128. , 153.4, 178.8, 204.2,
229.6, 255. ]),
<BarContainer object of 10 artists>)
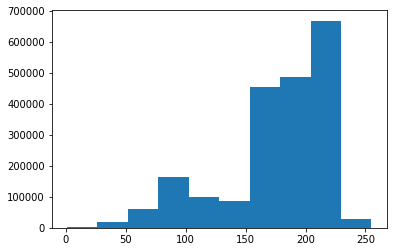
y, x, _ = plt.hist(oned)
print(x.max())
print(y.max())
255.0
668348.0
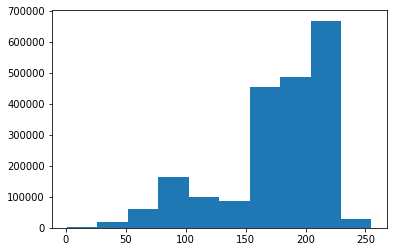
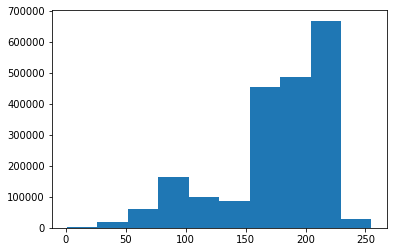
from matplotlib import pyplot as plt
img = cv2.imread('way-day.png')
img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
oned=img.ravel()
y, x, _ = plt.hist(oned)
print(x.max())
print(y.max())
255.0
668348.0
import numpy as np
img = cv2.imread('way-day.png')
img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
oned=img.ravel()
histog=np.histogram(oned)
y, x = histog[0],histog[1]
# Get the maximum element from a Numpy array
y_max = np.amax(y)
print('Y Max element from Numpy Array : ', y_max )
# Get the indices of maximum element in numpy array
result = np.where(y == np.amax(y))
print('Returned tuple of arrays :', result)
print('List of Indices of maximum element :', result[0])
position_max=result[0].item()
x_max=x[position_max]
print('x Max element from Numpy Array : ', x_max )
print('Max point (x_max,y_max) = (', x_max ,',' ,y_max,')' )
Y Max element from Numpy Array : 668348
Returned tuple of arrays : (array([8], dtype=int64),)
List of Indices of maximum element : [8]
x Max element from Numpy Array : 204.2
Max point (x_max,y_max) = ( 204.2 , 668348 )
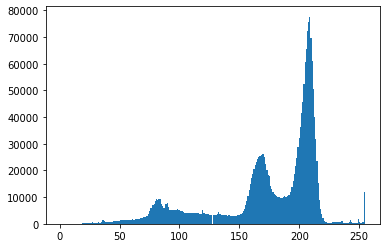
img = cv2.imread('way-night.png')
img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
oned=img.ravel()
y, x, _ = plt.hist(oned)
print(x.max())
print(y.max())
255.0
1258968.0
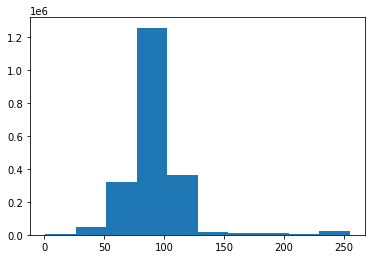
import numpy as np
img = cv2.imread('way-night.png')
img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
oned=img.ravel()
histog=np.histogram(oned)
y, x = histog[0],histog[1]
# Get the maximum element from a Numpy array
y_max = np.amax(y)
print('Y Max element from Numpy Array : ', y_max )
# Get the indices of maximum element in numpy array
result = np.where(y == np.amax(y))
print('Returned tuple of arrays :', result)
print('List of Indices of maximum element :', result[0])
position_max=result[0].item()
x_max=x[position_max]
print('x Max element from Numpy Array : ', x_max )
print('Max point (x_max,y_max) = (', x_max ,',' ,y_max,')' )
Y Max element from Numpy Array : 1258968
Returned tuple of arrays : (array([3], dtype=int64),)
List of Indices of maximum element : [3]
x Max element from Numpy Array : 77.19999999999999
Max point (x_max,y_max) = ( 77.19999999999999 , 1258968 )
point1 = [77.19, 90]
point2 = [204.2, 200]
x_values = [point1[0], point2[0]]
#gather x-values
y_values = [point1[1], point2[1]]
#gather y-values
plt.plot(x_values, y_values)
from numpy import ones,vstack
from numpy.linalg import lstsq
points = [(77.19, 90),(204.2, 200)]
x_coords, y_coords = zip(*points)
A = vstack([x_coords,ones(len(x_coords))]).T
m, c = lstsq(A, y_coords)[0]
print("Line Solution is y = {m}x + {c}".format(m=m,c=c))
Line Solution is y = 0.8660735375167304x + 23.147783639083652
C:\Anaconda3\envs\pygta5\lib\site-packages\ipykernel_launcher.py:6: FutureWarning: `rcond` parameter will change to the default of machine precision times ``max(M, N)`` where M and N are the input matrix dimensions.
To use the future default and silence this warning we advise to pass `rcond=None`, to keep using the old, explicitly pass `rcond=-1`.
import matplotlib.pyplot as plt
import numpy as np
x = np.linspace(0,200,100)
y = 0.8660735375167304*x + 23.147783639083652
plt.plot(x, y, '-r', label='y = 0.86x + 23.14')
plt.title('Graph of y = 0.86x + 23.14')
plt.xlabel('x', color='#1C2833')
plt.ylabel('y', color='#1C2833')
plt.legend(loc='upper left')
plt.grid()
plt.show()
Filter function
Now that we have identifed which is the function than can optimize the filter parameter we define it
def parmeterv(x):
y= 0.8660735375167304*x + 23.147783639083652
return y
def parameter(img):
#img = cv2.imread('way-night.png')
#img = cv2.imread('way-day.png')
img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
oned=img.ravel()
#y, x, _ = plt.hist(oned)
histog=np.histogram(oned)
y, x = histog[0],histog[1]
# Get the maximum element from a Numpy array
y_max = np.amax(y)
# Get the indices of maximum element in numpy array
result = np.where(y == np.amax(y))
position_max=result[0].item()
x_max=x[position_max]
#print(x_max)
intensity = parmeterv(x_max)
return intensity
We check if the it is provided the correct parameters
# For the day should be v=200
img = cv2.imread('way-day.png')
parameter(img)
200.0
# For the nigth should be v=90
img = cv2.imread('way-night.png')
parameter(img)
90.00866073537523
def process_black_contour(img):
image = img
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
#thresh = cv2.threshold(gray,90, 255,cv2.THRESH_BINARY_INV)[1] # only for night
#thresh = cv2.threshold(gray,200, 255,cv2.THRESH_BINARY_INV)[1] # only for day
intensity=parameter(image)
thresh = cv2.threshold(gray,intensity, 255,cv2.THRESH_BINARY_INV)[1] # any time or weather
cnts, h = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
label = '1'
count = 0
# Get inner list of hierarchy
for layer in zip(cnts, h[0]):
contour = layer[0]
hierarchy = layer[1]
# If we find new contour (not inner) reset label
if hierarchy[1] >= 0:
label = '1'
# Ensure that we only have outer contour
if count % 2 == 0:
cv2.drawContours(image, [contour], -1, (36, 255, 12), 2)
x,y,w,h = cv2.boundingRect(contour)
cv2.putText(image, label, (x +50,y+ 70), cv2.FONT_HERSHEY_SIMPLEX, 0.7, (36,255,12), 3)
label = str(int(label) * -1)
count += 1
return thresh
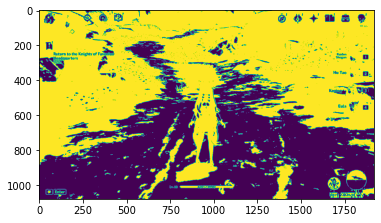
For the day we identify the way
img = cv2.imread('way-day.png')
img_prepro_day=process_black_contour(img)
showarray(img_prepro_day)
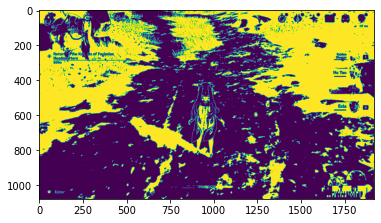
For the night we identify the way
img = cv2.imread('way-night.png')
img_prepro_night=process_black_contour(img)
showarray(img_prepro_night)
You can download his notebook here
Congratulations! We can use this latest filters to start develop our ML models.
Leave a comment