Self Driving Car with Neural Networks
Hello, today I would like emulate a self driving car by using Neural Network in TensorFlow , In this blog post, we’ll see how to write a program to simulate a self driving car by using an open source emulator of driving car by using Neural Networks. If you want to run this python code , you should first enable the python environment where you want to deploy this project.
I have provided two notebooks to generate the neural network model, one that can be deployed in colab and another in your local computer.
First you should download the zip file, extract it and run the executable file.
Version 2, 2/07/17
Version 1, 12/09/16
Linux Mac Windows 32 Windows 64
Unity Simulator User Instructions
- Clone the repository to your local directory, please make sure to use Git LFS to properly pull over large texture and model assets.
- Install the free game making engine Unity, if you dont already have it. Unity is necessary to load all the assets.When you open the application
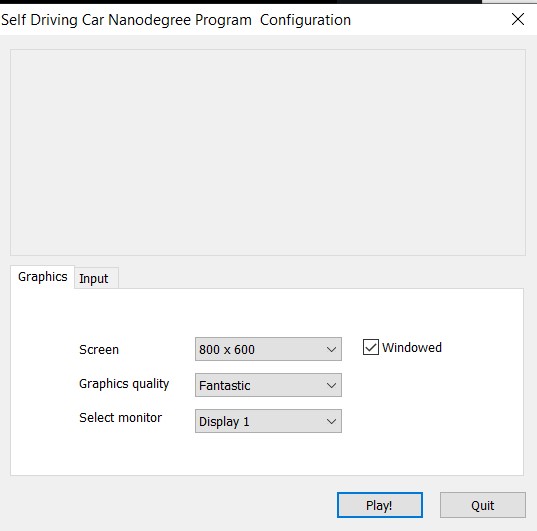
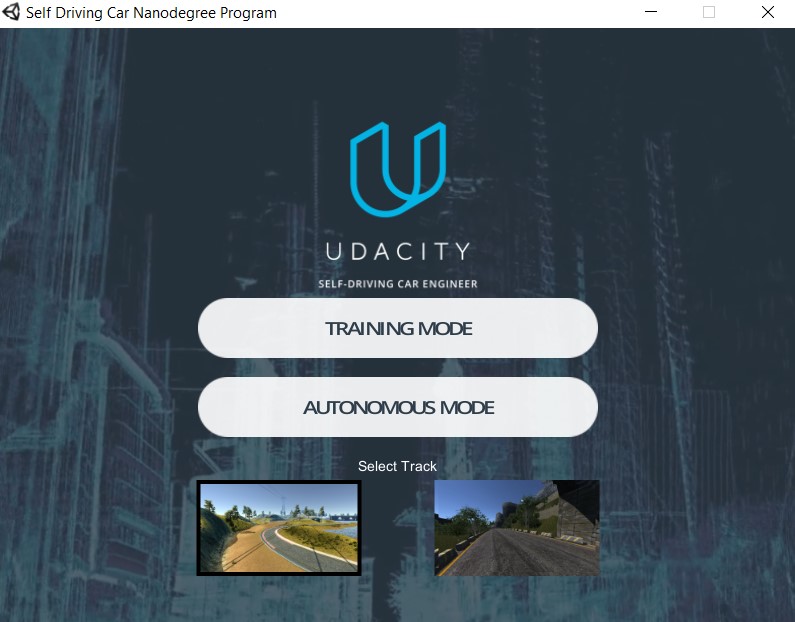
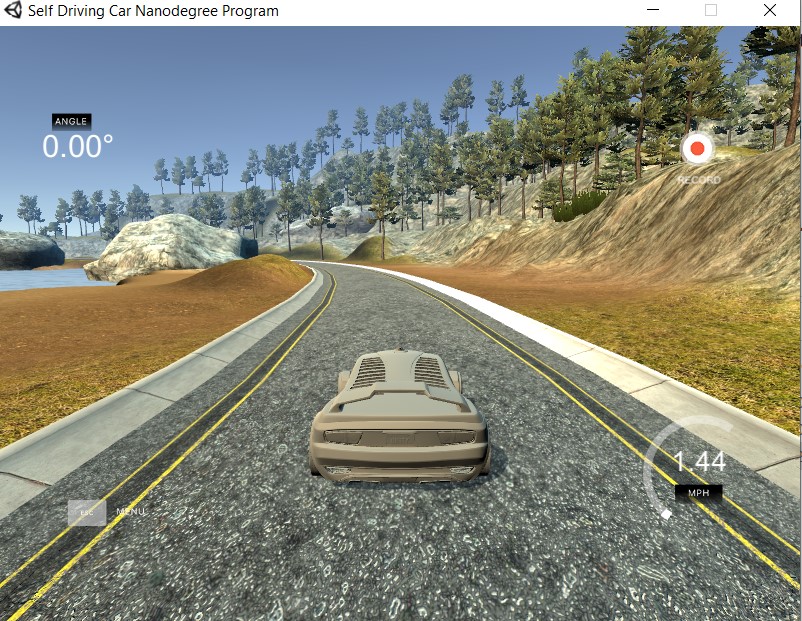
You select the training mode to generate your own data
and select the folder that you want to save your data.
Otherwise you can use my saved data in GitHub called track1
After you created your data files you should create your python environment
and install all the repositories needed
pip install eventlet
pip install python-engineio==3.13.2
pip install python-socketio==4.6.1
conda install -c conda-forge tensorflow
....
Create your Jupiter notebook with the following codes:
import os
import numpy as np
import matplotlib.pyplot as plt
import matplotlib.image as mpimg
import keras
from keras.models import Sequential
from keras.optimizers import Adam
from keras.layers import Convolution2D, MaxPooling2D, Dropout, Flatten, Dense
from sklearn.utils import shuffle
from sklearn.model_selection import train_test_split
from imgaug import augmenters as iaa
import cv2
import pandas as pd
import ntpath
import random
datadir = 'track1'
columns = ['center', 'left', 'right', 'steering', 'throttle', 'reverse', 'speed']
data = pd.read_csv(os.path.join(datadir, 'driving_log.csv'), names = columns)
pd.set_option('display.max_colwidth', -1)
data.head()
<ipython-input-6-7e0eb016f220>:4: FutureWarning: Passing a negative integer is deprecated in version 1.0 and will not be supported in future version. Instead, use None to not limit the column width.
pd.set_option('display.max_colwidth', -1)
| center | left | right | steering | throttle | reverse | speed | |
|---|---|---|---|---|---|---|---|
| 0 | C:\Users\ruslanmv\Desktop\new_track\IMG\center_2018_07_16_17_11_43_382.jpg | C:\Users\ruslanmv\Desktop\new_track\IMG\left_2018_07_16_17_11_43_382.jpg | C:\Users\ruslanmv\Desktop\new_track\IMG\right_2018_07_16_17_11_43_382.jpg | 0.0 | 0.0 | 0.0 | 0.649786 |
| 1 | C:\Users\ruslanmv\Desktop\new_track\IMG\center_2018_07_16_17_11_43_670.jpg | C:\Users\ruslanmv\Desktop\new_track\IMG\left_2018_07_16_17_11_43_670.jpg | C:\Users\ruslanmv\Desktop\new_track\IMG\right_2018_07_16_17_11_43_670.jpg | 0.0 | 0.0 | 0.0 | 0.627942 |
| 2 | C:\Users\ruslanmv\Desktop\new_track\IMG\center_2018_07_16_17_11_43_724.jpg | C:\Users\ruslanmv\Desktop\new_track\IMG\left_2018_07_16_17_11_43_724.jpg | C:\Users\ruslanmv\Desktop\new_track\IMG\right_2018_07_16_17_11_43_724.jpg | 0.0 | 0.0 | 0.0 | 0.622910 |
| 3 | C:\Users\ruslanmv\Desktop\new_track\IMG\center_2018_07_16_17_11_43_792.jpg | C:\Users\ruslanmv\Desktop\new_track\IMG\left_2018_07_16_17_11_43_792.jpg | C:\Users\ruslanmv\Desktop\new_track\IMG\right_2018_07_16_17_11_43_792.jpg | 0.0 | 0.0 | 0.0 | 0.619162 |
| 4 | C:\Users\ruslanmv\Desktop\new_track\IMG\center_2018_07_16_17_11_43_860.jpg | C:\Users\ruslanmv\Desktop\new_track\IMG\left_2018_07_16_17_11_43_860.jpg | C:\Users\ruslanmv\Desktop\new_track\IMG\right_2018_07_16_17_11_43_860.jpg | 0.0 | 0.0 | 0.0 | 0.615438 |
def path_leaf(path):
head, tail = ntpath.split(path)
return tail
data['center'] = data['center'].apply(path_leaf)
data['left'] = data['left'].apply(path_leaf)
data['right'] = data['right'].apply(path_leaf)
data.head()
| center | left | right | steering | throttle | reverse | speed | |
|---|---|---|---|---|---|---|---|
| 0 | center_2018_07_16_17_11_43_382.jpg | left_2018_07_16_17_11_43_382.jpg | right_2018_07_16_17_11_43_382.jpg | 0.0 | 0.0 | 0.0 | 0.649786 |
| 1 | center_2018_07_16_17_11_43_670.jpg | left_2018_07_16_17_11_43_670.jpg | right_2018_07_16_17_11_43_670.jpg | 0.0 | 0.0 | 0.0 | 0.627942 |
| 2 | center_2018_07_16_17_11_43_724.jpg | left_2018_07_16_17_11_43_724.jpg | right_2018_07_16_17_11_43_724.jpg | 0.0 | 0.0 | 0.0 | 0.622910 |
| 3 | center_2018_07_16_17_11_43_792.jpg | left_2018_07_16_17_11_43_792.jpg | right_2018_07_16_17_11_43_792.jpg | 0.0 | 0.0 | 0.0 | 0.619162 |
| 4 | center_2018_07_16_17_11_43_860.jpg | left_2018_07_16_17_11_43_860.jpg | right_2018_07_16_17_11_43_860.jpg | 0.0 | 0.0 | 0.0 | 0.615438 |
def path_leaf(path):
head, tail = ntpath.split(path)
return tail
data['center'] = data['center'].apply(path_leaf)
data['left'] = data['left'].apply(path_leaf)
data['right'] = data['right'].apply(path_leaf)
data.head()
| center | left | right | steering | throttle | reverse | speed | |
|---|---|---|---|---|---|---|---|
| 0 | center_2018_07_16_17_11_43_382.jpg | left_2018_07_16_17_11_43_382.jpg | right_2018_07_16_17_11_43_382.jpg | 0.0 | 0.0 | 0.0 | 0.649786 |
| 1 | center_2018_07_16_17_11_43_670.jpg | left_2018_07_16_17_11_43_670.jpg | right_2018_07_16_17_11_43_670.jpg | 0.0 | 0.0 | 0.0 | 0.627942 |
| 2 | center_2018_07_16_17_11_43_724.jpg | left_2018_07_16_17_11_43_724.jpg | right_2018_07_16_17_11_43_724.jpg | 0.0 | 0.0 | 0.0 | 0.622910 |
| 3 | center_2018_07_16_17_11_43_792.jpg | left_2018_07_16_17_11_43_792.jpg | right_2018_07_16_17_11_43_792.jpg | 0.0 | 0.0 | 0.0 | 0.619162 |
| 4 | center_2018_07_16_17_11_43_860.jpg | left_2018_07_16_17_11_43_860.jpg | right_2018_07_16_17_11_43_860.jpg | 0.0 | 0.0 | 0.0 | 0.615438 |
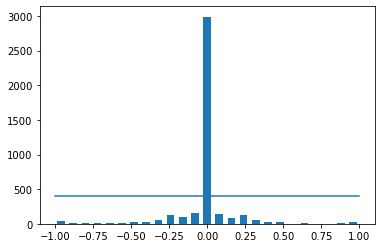
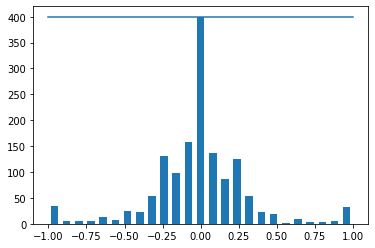
num_bins = 25
samples_per_bin = 400
hist, bins = np.histogram(data['steering'], num_bins)
center = (bins[:-1]+ bins[1:]) * 0.5
plt.bar(center, hist, width=0.05)
plt.plot((np.min(data['steering']), np.max(data['steering'])), (samples_per_bin, samples_per_bin))
print('total data:', len(data))
total data: 4053
remove_list = []
for j in range(num_bins):
list_ = []
for i in range(len(data['steering'])):
if data['steering'][i] >= bins[j] and data['steering'][i] <= bins[j+1]:
list_.append(i)
list_ = shuffle(list_)
list_ = list_[samples_per_bin:]
remove_list.extend(list_)
print('removed:', len(remove_list))
data.drop(data.index[remove_list], inplace=True)
print('remaining:', len(data))
removed: 2590
remaining: 1463
hist, _ = np.histogram(data['steering'], (num_bins))
plt.bar(center, hist, width=0.05)
plt.plot((np.min(data['steering']), np.max(data['steering'])), (samples_per_bin, samples_per_bin))
[<matplotlib.lines.Line2D at 0x7faba185fed0>]
print(data.iloc[1])
center center_2018_07_16_17_11_43_670.jpg
left left_2018_07_16_17_11_43_670.jpg
right right_2018_07_16_17_11_43_670.jpg
steering 0
throttle 0
reverse 0
speed 0.627942
Name: 1, dtype: object
def load_img_steering(datadir, df):
image_path = []
steering = []
for i in range(len(data)):
indexed_data = data.iloc[i]
center, left, right = indexed_data[0], indexed_data[1], indexed_data[2]
image_path.append(os.path.join(datadir, center.strip()))
steering.append(float(indexed_data[3]))
# left image append
image_path.append(os.path.join(datadir,left.strip()))
steering.append(float(indexed_data[3])+0.15)
# right image append
image_path.append(os.path.join(datadir,right.strip()))
steering.append(float(indexed_data[3])-0.15)
image_paths = np.asarray(image_path)
steerings = np.asarray(steering)
return image_paths, steerings
image_paths, steerings = load_img_steering(datadir + '/IMG', data)
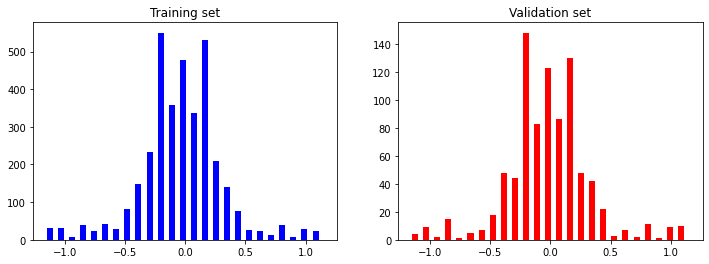
X_train, X_valid, y_train, y_valid = train_test_split(image_paths, steerings, test_size=0.2, random_state=6)
print('Training Samples: {}\nValid Samples: {}'.format(len(X_train), len(X_valid)))
Training Samples: 3511
Valid Samples: 878
fig, axes = plt.subplots(1, 2, figsize=(12, 4))
axes[0].hist(y_train, bins=num_bins, width=0.05, color='blue')
axes[0].set_title('Training set')
axes[1].hist(y_valid, bins=num_bins, width=0.05, color='red')
axes[1].set_title('Validation set')
Text(0.5, 1.0, 'Validation set')
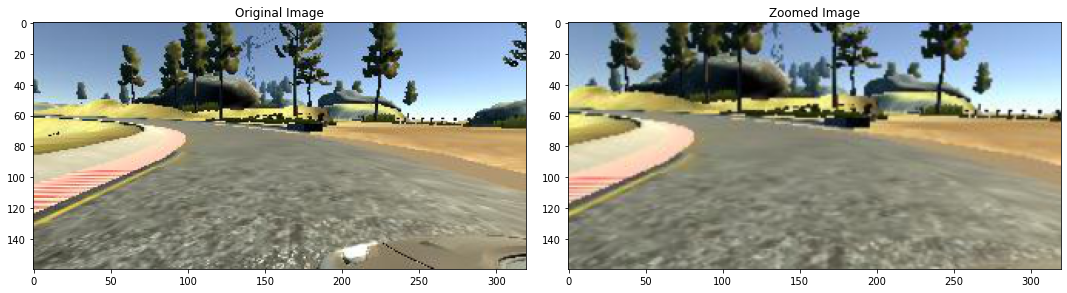
def zoom(image):
zoom = iaa.Affine(scale=(1, 1.3))
image = zoom.augment_image(image)
return image
image = image_paths[random.randint(0, 1000)]
original_image = mpimg.imread(image)
zoomed_image = zoom(original_image)
fig, axs = plt.subplots(1, 2, figsize=(15, 10))
fig.tight_layout()
axs[0].imshow(original_image)
axs[0].set_title('Original Image')
axs[1].imshow(zoomed_image)
axs[1].set_title('Zoomed Image')
Text(0.5, 1.0, 'Zoomed Image')
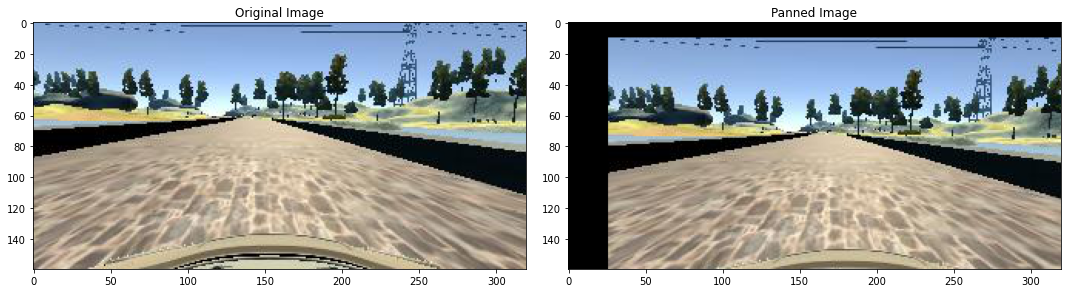
def pan(image):
pan = iaa.Affine(translate_percent= {"x" : (-0.1, 0.1), "y": (-0.1, 0.1)})
image = pan.augment_image(image)
return image
image = image_paths[random.randint(0, 1000)]
original_image = mpimg.imread(image)
panned_image = pan(original_image)
def pan(image):
pan = iaa.Affine(translate_percent= {"x" : (-0.1, 0.1), "y": (-0.1, 0.1)})
image = pan.augment_image(image)
return image
image = image_paths[random.randint(0, 1000)]
original_image = mpimg.imread(image)
panned_image = pan(original_image)
fig, axs = plt.subplots(1, 2, figsize=(15, 10))
fig.tight_layout()
axs[0].imshow(original_image)
axs[0].set_title('Original Image')
axs[1].imshow(panned_image)
axs[1].set_title('Panned Image')
Text(0.5, 1.0, 'Panned Image')
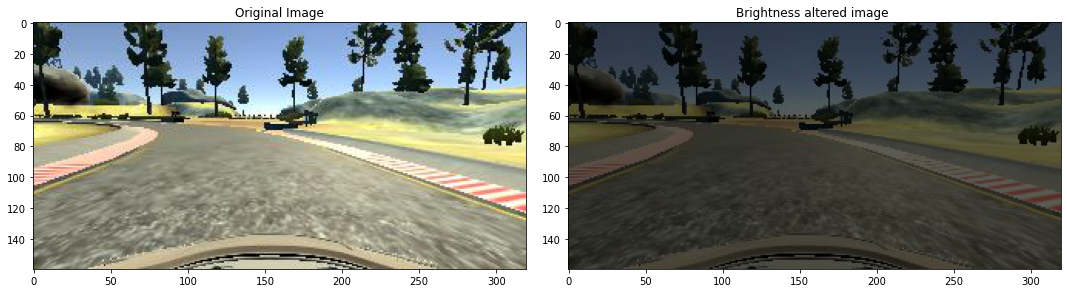
def img_random_brightness(image):
brightness = iaa.Multiply((0.2, 1.2))
image = brightness.augment_image(image)
return image
image = image_paths[random.randint(0, 1000)]
original_image = mpimg.imread(image)
brightness_altered_image = img_random_brightness(original_image)
fig, axs = plt.subplots(1, 2, figsize=(15, 10))
fig.tight_layout()
axs[0].imshow(original_image)
axs[0].set_title('Original Image')
axs[1].imshow(brightness_altered_image)
axs[1].set_title('Brightness altered image ')
Text(0.5, 1.0, 'Brightness altered image ')
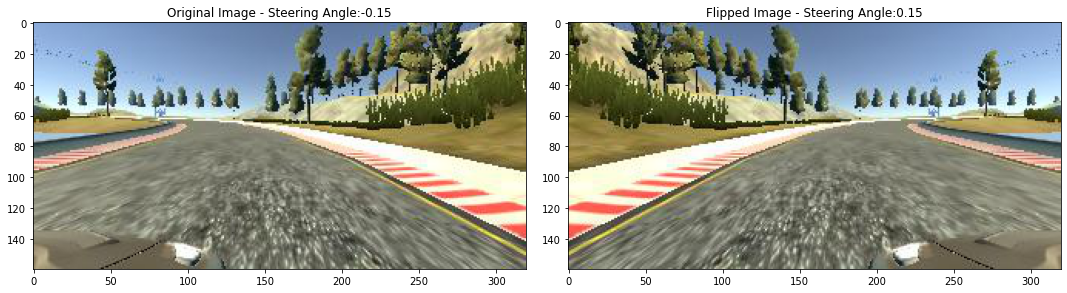
def img_random_flip(image, steering_angle):
image = cv2.flip(image,1)
steering_angle = -steering_angle
return image, steering_angle
random_index = random.randint(0, 1000)
image = image_paths[random_index]
steering_angle = steerings[random_index]
original_image = mpimg.imread(image)
flipped_image, flipped_steering_angle = img_random_flip(original_image, steering_angle)
fig, axs = plt.subplots(1, 2, figsize=(15, 10))
fig.tight_layout()
axs[0].imshow(original_image)
axs[0].set_title('Original Image - ' + 'Steering Angle:' + str(steering_angle))
axs[1].imshow(flipped_image)
axs[1].set_title('Flipped Image - ' + 'Steering Angle:' + str(flipped_steering_angle))
Text(0.5, 1.0, 'Flipped Image - Steering Angle:0.15')
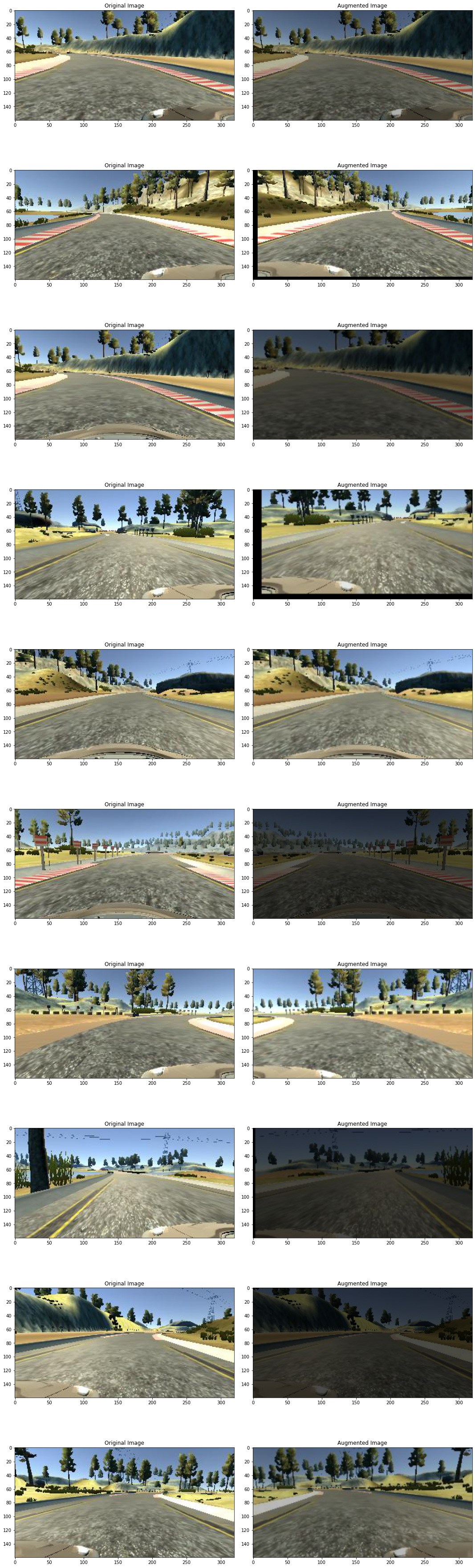
def random_augment(image, steering_angle):
image = mpimg.imread(image)
if np.random.rand() < 0.5:
image = pan(image)
if np.random.rand() < 0.5:
image = zoom(image)
if np.random.rand() < 0.5:
image = img_random_brightness(image)
if np.random.rand() < 0.5:
image, steering_angle = img_random_flip(image, steering_angle)
return image, steering_angle
ncol = 2
nrow = 10
fig, axs = plt.subplots(nrow, ncol, figsize=(15, 50))
fig.tight_layout()
for i in range(10):
randnum = random.randint(0, len(image_paths) - 1)
random_image = image_paths[randnum]
random_steering = steerings[randnum]
original_image = mpimg.imread(random_image)
augmented_image, steering = random_augment(random_image, random_steering)
axs[i][0].imshow(original_image)
axs[i][0].set_title("Original Image")
axs[i][1].imshow(augmented_image)
axs[i][1].set_title("Augmented Image")
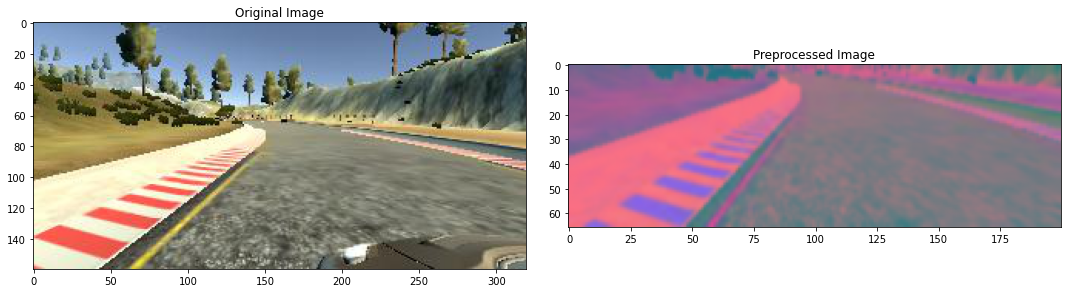
def img_preprocess(img):
img = img[60:135,:,:]
img = cv2.cvtColor(img, cv2.COLOR_RGB2YUV)
img = cv2.GaussianBlur(img, (3, 3), 0)
img = cv2.resize(img, (200, 66))
img = img/255
return img
image = image_paths[100]
original_image = mpimg.imread(image)
preprocessed_image = img_preprocess(original_image)
fig, axs = plt.subplots(1, 2, figsize=(15, 10))
fig.tight_layout()
axs[0].imshow(original_image)
axs[0].set_title('Original Image')
axs[1].imshow(preprocessed_image)
axs[1].set_title('Preprocessed Image')
Text(0.5, 1.0, 'Preprocessed Image')
def batch_generator(image_paths, steering_ang, batch_size, istraining):
while True:
batch_img = []
batch_steering = []
for i in range(batch_size):
random_index = random.randint(0, len(image_paths) - 1)
if istraining:
im, steering = random_augment(image_paths[random_index], steering_ang[random_index])
else:
im = mpimg.imread(image_paths[random_index])
steering = steering_ang[random_index]
im = img_preprocess(im)
batch_img.append(im)
batch_steering.append(steering)
yield (np.asarray(batch_img), np.asarray(batch_steering))
x_train_gen, y_train_gen = next(batch_generator(X_train, y_train, 1, 1))
x_valid_gen, y_valid_gen = next(batch_generator(X_valid, y_valid, 1, 0))
fig, axs = plt.subplots(1, 2, figsize=(15, 10))
fig.tight_layout()
axs[0].imshow(x_train_gen[0])
axs[0].set_title('Training Image')
axs[1].imshow(x_valid_gen[0])
axs[1].set_title('Validation Image')
Text(0.5, 1.0, 'Validation Image')

def nvidia_model2():
model = Sequential()
model.add(Convolution2D(24, 5, 5, subsample=(2, 2), input_shape=(66, 200, 3), activation='elu'))
model.add(Convolution2D(36, 5, 5, subsample=(2, 2), activation='elu'))
model.add(Convolution2D(48, 5, 5, subsample=(2, 2), activation='elu'))
model.add(Convolution2D(64, 3, 3, activation='elu'))
model.add(Convolution2D(64, 3, 3, activation='elu'))
# model.add(Dropout(0.5))
model.add(Flatten())
model.add(Dense(100, activation = 'elu'))
# model.add(Dropout(0.5))
model.add(Dense(50, activation = 'elu'))
# model.add(Dropout(0.5))
model.add(Dense(10, activation = 'elu'))
# model.add(Dropout(0.5))
model.add(Dense(1))
optimizer = Adam(lr=1e-3)
model.compile(loss='mse', optimizer=optimizer)
return model
#If you're using Keras via the Tensorflow 2.0 API,
#then note that subsample has been changed to strides
def nvidia_model():
model = Sequential()
model.add(Conv2D(24, kernel_size=(5,5), strides=(2,2), input_shape=(66,200,3),activation='relu'))
model.add(Conv2D(36, kernel_size=(5,5), strides=(2,2), activation='relu'))
model.add(Conv2D(48, kernel_size=(5,5), strides=(2,2), activation='relu'))
model.add(Conv2D(64, kernel_size=(3,3), activation='relu'))
model.add(Conv2D(64, kernel_size=(3,3), activation='relu'))
model.add(Dropout(0.5))
model.add(Flatten())
model.add(Dense(100, activation='relu'))
model.add(Dropout(0.5))
model.add(Dense(50, activation='relu'))
model.add(Dense(10, activation ='relu'))
model.add(Dense(1))
optimizer= Adam(learning_rate=1e-3)
model.compile(loss='mse', optimizer=optimizer)
return model
#from tensorflow.keras.layers import Conv2D
from keras.layers import Conv2D
model = nvidia_model()
model.build( input_shape=(None,66, 200, 3)) # `input_shape` is the shape of the input data
# e.g. input_shape = (None, 32, 32, 3)
model.summary()
Model: "sequential_5"
_________________________________________________________________
Layer (type) Output Shape Param #
=================================================================
conv2d (Conv2D) (None, 31, 98, 24) 1824
_________________________________________________________________
conv2d_1 (Conv2D) (None, 14, 47, 36) 21636
_________________________________________________________________
conv2d_2 (Conv2D) (None, 5, 22, 48) 43248
_________________________________________________________________
conv2d_3 (Conv2D) (None, 3, 20, 64) 27712
_________________________________________________________________
conv2d_4 (Conv2D) (None, 1, 18, 64) 36928
_________________________________________________________________
dropout_6 (Dropout) (None, 1, 18, 64) 0
_________________________________________________________________
flatten_3 (Flatten) (None, 1152) 0
_________________________________________________________________
dense_12 (Dense) (None, 100) 115300
_________________________________________________________________
dropout_7 (Dropout) (None, 100) 0
_________________________________________________________________
dense_13 (Dense) (None, 50) 5050
_________________________________________________________________
dense_14 (Dense) (None, 10) 510
_________________________________________________________________
dense_15 (Dense) (None, 1) 11
=================================================================
Total params: 252,219
Trainable params: 252,219
Non-trainable params: 0
_________________________________________________________________
history = model.fit_generator(batch_generator(X_train, y_train, 100, 1),
steps_per_epoch=300,
epochs=10,
validation_data=batch_generator(X_valid, y_valid, 100, 0),
validation_steps=200,
verbose=1,
shuffle = 1)
/usr/local/lib/python3.7/dist-packages/keras/engine/training.py:1915: UserWarning: `Model.fit_generator` is deprecated and will be removed in a future version. Please use `Model.fit`, which supports generators.
warnings.warn('`Model.fit_generator` is deprecated and '
Epoch 1/10
300/300 [==============================] - 398s 1s/step - loss: 0.1175 - val_loss: 0.1176
Epoch 2/10
300/300 [==============================] - 372s 1s/step - loss: 0.1151 - val_loss: 0.1190
Epoch 3/10
300/300 [==============================] - 381s 1s/step - loss: 0.1152 - val_loss: 0.1145
Epoch 4/10
300/300 [==============================] - 384s 1s/step - loss: 0.1127 - val_loss: 0.1194
Epoch 5/10
300/300 [==============================] - 382s 1s/step - loss: 0.1149 - val_loss: 0.1160
Epoch 6/10
300/300 [==============================] - 381s 1s/step - loss: 0.1104 - val_loss: 0.1196
Epoch 7/10
300/300 [==============================] - 376s 1s/step - loss: 0.1124 - val_loss: 0.1165
Epoch 8/10
300/300 [==============================] - 377s 1s/step - loss: 0.1142 - val_loss: 0.1209
Epoch 9/10
300/300 [==============================] - 377s 1s/step - loss: 0.1171 - val_loss: 0.1179
Epoch 10/10
300/300 [==============================] - 380s 1s/step - loss: 0.1131 - val_loss: 0.1159
plt.plot(history.history['loss'])
plt.plot(history.history['val_loss'])
plt.legend(['training', 'validation'])
plt.title('Loss')
plt.xlabel('Epoch')
model.save('model.h5')

We create our model called mode.h5
In order to communicate with our emulator we use Flask
Flask Code
import socketio
import eventlet
import numpy as np
from flask import Flask
from keras.models import load_model
import base64
from io import BytesIO
from PIL import Image
import cv2
sio = socketio.Server()
app = Flask(__name__) #'__main__'
speed_limit = 10
def img_preprocess(img):
img = img[60:135,:,:]
img = cv2.cvtColor(img, cv2.COLOR_RGB2YUV)
img = cv2.GaussianBlur(img, (3, 3), 0)
img = cv2.resize(img, (200, 66))
img = img/255
return img
@sio.on('telemetry')
def telemetry(sid, data):
speed = float(data['speed'])
image = Image.open(BytesIO(base64.b64decode(data['image'])))
image = np.asarray(image)
image = img_preprocess(image)
image = np.array([image])
steering_angle = float(model.predict(image))
throttle = 1.0 - speed/speed_limit
print('{} {} {}'.format(steering_angle, throttle, speed))
send_control(steering_angle, throttle)
@sio.on('connect')
def connect(sid, environ):
print('Connected')
send_control(0, 0)
def send_control(steering_angle, throttle):
sio.emit('steer', data = {
'steering_angle': steering_angle.__str__(),
'throttle': throttle.__str__()
})
if __name__ == '__main__':
model = load_model('model.h5')
app = socketio.Middleware(sio, app)
eventlet.wsgi.server(eventlet.listen(('', 4567)), app)
First open your terminal with your enviroment
later go to your folder where is your code called drive.py
type
python drive.py
open your drive emulator and choose autonomous mode
and then you can check your how is running your code.
You can download the full notebook here:
https://github.com/ruslanmv/self-driving-car-with-neural-networks
Congratulations! We have applied Neural Networks in Tensorflow to emulate a self driver car.
Leave a comment