Reinforcement Learning with Atari Games and Neural Networks
Today In this blog I will show: How to open an atari games by using python and we will chose one game to perform Reinforment Learning by using colab.
Gym is a toolkit for developing and comparing reinforcement learning algorithms. It makes no assumptions about the structure of your agent, and is compatible with any numerical computation library, such as TensorFlow or Theano.
The gym library is a collection of test problems — environments — that you can use to work out your reinforcement learning algorithms. These environments have a shared interface, allowing you to write general algorithms.
The environment’s step function returns exactly what we need. In fact, step returns four values. These are:
observation(object): an environment-specific object representing your observation of the environment. For example, pixel data from a camera, joint angles and joint velocities of a robot, or the board state in a board game.reward(float): amount of reward achieved by the previous action. The scale varies between environments, but the goal is always to increase your total reward.done(boolean): whether it’s time toresetthe environment again. Most tasks are divided up into well-defined episodes, anddonebeingTrueindicates the episode has terminated.info(dict): diagnostic information useful for debugging. It can sometimes be useful for learning . However, official evaluations of your agent are not allowed to use this for learning.
This is just an implementation of the classic “agent-environment loop”. Each timestep, the agent chooses an action, and the environment returns an observation and a reward.

The process gets started by calling reset(), which returns an initial observation. So a more proper way of writing the previous code would be to respect the done flag.
Gym comes with a diverse suite of environments that range from easy to difficult and involve many different kinds of data.
- Classic control and toy text: complete small-scale tasks, mostly from the RL literature.
- Algorithmic: perform computations such as adding multi-digit numbers and reversing sequences. One might object that these tasks are easy for a computer.
- Atari: play classic Atari games.
- 2D and 3D robots: control a robot in simulation.
Installation
To get started, you’ll need to have Python 3.5+ installed. Simply install gym using pip:
pip install gym
pip install gym[atari]
In order to import ROMS, you need to download Roms.rar from the Atari 2600 VCS ROM Collection and extract the .rar file. Once you’ve done that, run:
python -m atari_py.import_roms <path to folder>
This should print out the names of ROMs as it imports them. The ROMs will be copied to your atari_py installation directory.
Go to this link. Click “raw”. Copy the text and save it to a file called keyboard_agent.py
Open up a shell prompt and navigate to where you saved the file.
Run the file with Python, followed by the name of the environment that you wish to play.
For example,
python keyboard_agent.py MsPacman-v0
Play the game! The actions are normally mapped to the keys 0,1,2,3,4…, just as they are for the agent. You may have to look up the controls of the environment if you can’t figure it out
or
python keyboard_agent.py LunarLander-v2
Lunar Lander is a single-player arcade game in the Lunar Lander subgenre. It was developed by Atari. The player controls a lunar landing module viewed from the side and attempts to land safely on the Moon. The player can rotate the module and burn fuel to fire a thruster, attempting to gently land on marked areas. The scenario resets after every successful landing or crash, with new terrain.
LunarLander - v2
Landing pad is always at coordinates (0,0). Coordinates are the first two numbers in state vector. Reward for moving from the top of the screen to landing pad and zero speed is about 100..140 points. If lander moves away from landing pad it loses reward back. Episode finishes if the lander crashes or comes to rest, receiving additional -100 or +100 points. Each leg ground contact is +10. Firing main engine is -0.3 points each frame. Solved is 200 points. Landing outside landing pad is possible. Fuel is infinite, so an agent can learn to fly and then land on its first attempt. Four discrete actions available: do nothing, fire left orientation engine, fire main engine, fire right orientation engine.
Get started with Reinforcement Learning in colab.
Login with you collab account here and type the codes that I will present
from google.colab import drive
drive.mount('/content/gdrive')
root_path = 'gdrive/My Drive/Reinforcement-Learning/'
!ls
# Path Example
#gdrive sample_data
!pip install gym
!apt-get install python-opengl -y
!apt install xvfb -y
# Special gym environment
#!pip3 install box2d-py==2.3.8
!apt-get install python-box2d
!pip3 install box2d-py==2.3.8
#!pip install box2d-py
#!pip install gym[Box_2D]
#!pip install gym[LunarLander-v2]
# For rendering environment, you can use pyvirtualdisplay.
!pip install pyvirtualdisplay
!pip install piglet
# To activate virtual display
# need to run a script once for training an agent as follows
from pyvirtualdisplay import Display
display = Display(visible=0, size=(1400, 900))
display.start()
<pyvirtualdisplay.display.Display at 0x7fa6354dc750>
# This code creates a virtual display to draw game images on.
# If you are running locally, just ignore it
import os
if type(os.environ.get("DISPLAY")) is not str or len(os.environ.get("DISPLAY"))==0:
!bash ../xvfb start
%env DISPLAY=:1
#
# Import libraries
#
import gym
from gym import logger as gymlogger
from gym.wrappers import Monitor
gymlogger.set_level(40) # error only
import tensorflow as tf
import numpy as np
import random
import matplotlib
import matplotlib.pyplot as plt
%matplotlib inline
import math
import glob
import io
import base64
from IPython.display import HTML
from IPython import display as ipythondisplay
"""
Utility functions to enable video recording of gym environment and displaying it
To enable video, just do "env = wrap_env(env)""
"""
def show_video():
mp4list = glob.glob('video/*.mp4')
if len(mp4list) > 0:
mp4 = mp4list[0]
video = io.open(mp4, 'r+b').read()
encoded = base64.b64encode(video)
ipythondisplay.display(HTML(data='''<video alt="test" autoplay
loop controls style="height: 400px;">
<source src="data:video/mp4;base64,{0}" type="video/mp4" />
</video>'''.format(encoded.decode('ascii'))))
else:
print("Could not find video")
def wrap_env(env):
env = Monitor(env, './video', force=True)
return env
!pip install ptan
import gym
import ptan
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
import time
env = gym.make('LunarLander-v2')
env.reset()
for _ in range(1000):
#env.render()
env.step(env.action_space.sample())
#env.render()
env.step(env.action_space.sample())
env.close()
class PolicyNetwork(nn.Module):
"""
PGN-Policy Gradient Network (Function Approximator):
- input size: number of observation states in environment
- n_actions: number of actions in environment
We will use neural network with one hidden layer, which
has one hidden layer with 128 neurons and ReLU activation function,
as was described in report. So, our vector of \theta parameters
will have 128 elements.
"""
# initialization function
def __init__(self, input_size, n_actions):
super(PolicyNetwork, self).__init__()
# Creating a simple neural network with 128 parameters \theta
# in one hidden layer
# Softmax activation will be done in the algorithm later.
self.net = nn.Sequential(
nn.Linear(input_size, 128),
nn.ReLU(),
nn.Linear(128, n_actions)
)
# forward propagation function
def forward(self, x):
return self.net(x)
def compute_q_vals(rewards):
"""
rewards: list of rewards collected in episode
"""
res = []
sum_r = 0.0
# looping through the list of rewards in reverse order
# because in REINFORCE (look at report pseudocode)
# last action receives one last reward, pre-last action
# receives pre-last reward plus discounted last etc.:
for r in reversed(rewards):
sum_r *= 0.99 #GAMMA
sum_r += r
res.append(sum_r)
# we againg reverse our list of rewards per action
# in the order actions appeared
return list(reversed(res))
def REINFORCE(learning_rate, gamma=0.99, num_episodes_train=4, env="LunarLander-v2", max_num_steps=35000000):
"""
-learning rate: coefficient, by which we multiply gradient in update rule
-gamma: discount coefficient from bellmann equation
-num_episode_train: number of episodes in which we collect experience
before performing learning
-env: environment used in training.
-max_num_steps: num of steps after which training established unsuccessful
"""
#creating separate list for indexes of steps taken
step_list = []
#creating separate list for mean rewards of last 100 episodes
mean_rewards_list = []
#values of gradient vactor variance
var_grad_list = []
#creating an instance of 'LunarLander' environment using Gym library
env = gym.make(env)
#creating an instance of above defined Policy Gradient Network
#our input
net = PolicyNetwork(env.observation_space.shape[0], env.action_space.n)
# creating an artificial agent using library ptan, which under the hood
# get network raw results and applies softmax activation to choose action
# from the state
agent = ptan.agent.PolicyAgent(net, preprocessor=ptan.agent.float32_preprocessor,
apply_softmax=True)
# create experience source with LunarLander environment
exp_source = ptan.experience.ExperienceSourceFirstLast(env, agent, gamma=gamma)
# we will use Adam optimizer as it is considered the only option
# which really works in RL setting
optimizer = optim.Adam(net.parameters(), lr=learning_rate)
#create list for collecting total rewards
total_rewards = []
# creating counters
step_idx = 0
done_episodes = 0
batch_episodes = 0
# creating empty list, where we will store batches of
# states, actions, q-values to use it in our policy
# gradient algo
batch_states, batch_actions, batch_qvals = [], [], []
cur_rewards = []
# iterate over each step in environment until
# last episode in batch of episodes used for training
# is finished
for step_idx, exp in enumerate(exp_source):
batch_states.append(exp.state)
batch_actions.append(int(exp.action))
cur_rewards.append(exp.reward)
# check whether episde
if exp.last_state is None:
batch_qvals.extend(compute_q_vals(cur_rewards))
cur_rewards.clear()
batch_episodes += 1
new_rewards = exp_source.pop_total_rewards()
# check whether episode ended
# if episode ends then we will append all rewards to
# our total rewards list
if new_rewards:
done_episodes += 1
reward = new_rewards[0]
total_rewards.append(reward)
# calculate mean reward per last 100 steps;
# episode can contain more but we assume
# that environment is solved if mean reward
# per 100 steps > 195
mean_rewards = float(np.mean(total_rewards[-100:]))
# monitor how our agent is learning
print("%d: reward: %6.2f, mean_100: %6.2f, episodes: %d" % (
step_idx, reward, mean_rewards, done_episodes))
# collecting steps, mean rewards and rewards_list in order
# to use afterwards in comparing our algorithms
step_list.append(step_idx)
mean_rewards_list.append(mean_rewards)
# check whether our environment is solved
if mean_rewards > 195:
print("Solved in %d steps and %d episodes!" % (step_idx, done_episodes))
break
# establish some reasonable point of time
# where there is no need to destroy our CPU
elif step_idx > max_num_steps:
print(0.01,':not_converged')
print('')
break
# check whether we iterated over necessary
# number of episode;
# if not - continue to collect experience
if batch_episodes < num_episodes_train:
continue
# setting the gradients to zero before starting to do backpropragation
# because PyTorch accumulates the gradients on subsequent backward passes
optimizer.zero_grad()
# converting our lists to float tensors
states_v = torch.FloatTensor(batch_states)
batch_actions_t = torch.LongTensor(batch_actions)
batch_qvals_v = torch.FloatTensor(batch_qvals)
# doing forward propagation via our 128 randomly inialized weights
logits_v = net(states_v)
# outputting probabilities per each action
log_prob_v = F.log_softmax(logits_v, dim=1)
# multiplying our q-values with log probability
log_prob_actions_v = batch_qvals_v * log_prob_v[range(len(batch_states)), batch_actions_t]
# averaging out our loss
loss_v = -log_prob_actions_v.mean()
#finding gradient of the loss
loss_v.backward()
#performing update rule
optimizer.step()
grads = np.concatenate([p.grad.data.cpu().numpy().flatten()
for p in net.parameters()
if p.grad is not None])
var_grad_list.append(np.var(grads))
#clearing out all accumulated experience before doing new iteration
batch_episodes = 0
batch_states.clear()
batch_actions.clear()
batch_qvals.clear()
return step_list,mean_rewards_list,net
step_list,mean_rewards_list,net = REINFORCE(0.01, gamma=0.99, num_episodes_train=4, env="LunarLander-v2", max_num_steps=2000000)
1609521: reward: 22.48, mean_100: 27.02, episodes: 6432
# learn rate 0.1
step_list_1,mean_rewards_list_1,net_001 = REINFORCE(0.1, gamma=0.99, num_episodes_train=4, env="LunarLander-v2", max_num_steps=3000000)
df = pd.DataFrame()
# save results
df['mean_reward_100_steps'] = mean_rewards_list_1
df['steps'] = step_list_1
df.to_csv('gdrive/My Drive/Reinforcement-Learning/reinforce_0.1.csv')
[1;30;43mStreaming output truncated to the last 5000 lines.[0m
2664200: reward: -466.72, mean_100: -574.41, episodes: 39636
2664259: reward: -539.37, mean_100: -575.94, episodes: 39637
2999985: reward: -643.52, mean_100: -573.46, episodes: 44631
3000064: reward: -730.58, mean_100: -574.23, episodes: 44632
0.01 :not_converged
reinf_v1 = pd.read_csv('gdrive/My Drive/Reinforcement-Learning/reinforce_0.01.csv')
reinf_v2 = pd.read_csv('gdrive/My Drive/Reinforcement-Learning/reinforce_0.001.csv')
reinf_v3 = pd.read_csv('gdrive/My Drive/Reinforcement-Learning/reinforce_0.1.csv')
reinf_v1.drop('Unnamed: 0',axis=1,inplace=True)
reinf_v2.drop('Unnamed: 0',axis=1,inplace=True)
reinf_v3.drop('Unnamed: 0',axis=1,inplace=True)
reinf_v3['mean_0.01'] = reinf_v1['mean_reward_100_steps']
reinf_v3['mean_0.01_steps'] = reinf_v1['steps']
reinf_v3['mean_0.001'] = reinf_v2['mean_reward_100_steps']
reinf_v3['mean_0.001_steps'] = reinf_v2['steps']
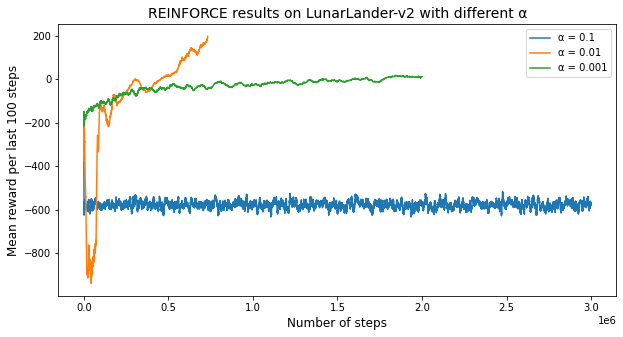
plt.figure(figsize=(10,5))
plt.plot(reinf_v3['steps'],reinf_v3['mean_reward_100_steps'])
plt.plot(reinf_v3['mean_0.01_steps'],reinf_v3['mean_0.01'])
plt.plot(reinf_v3['mean_0.001_steps'],reinf_v3['mean_0.001'])
plt.xlabel('Number of steps',fontSize=12)
plt.ylabel('Mean reward per last 100 steps',fontSize=12)
plt.legend(['α = 0.1','α = 0.01','α = 0.001'])
plt.title('REINFORCE results on LunarLander-v2 with different α',fontSize=14)
plt.show()
class A2C(nn.Module):
"""
A2C-Advantage Actor Critic (has two function approximators):
- input size: number of observation states in environment
- n_actions: number of actions in environment
We will use neural network with one hidden layer, which
has one hidden layer with 128 neurons and ReLU activation function,
as was described in report. So, our vector of \theta parameters
will have 128 elements.
"""
# initialization function
def __init__(self, input_size, n_actions):
super(A2C, self).__init__()
# Creating a simple neural network with 128 parameters \theta
# in one hidden layer
# Softmax activation will be done in the algorithm later.
self.policy = nn.Sequential(nn.Linear(input_size, 128),nn.ReLU(),nn.Linear(128, n_actions))
# Creating a simple neural network with 128 parameters \w
# in one hidden layer
self.value = nn.Sequential(nn.Linear(input_size, 128),nn.ReLU(),nn.Linear(128, 1))
# forward propagation function
def forward(self, x):
return self.policy(x), self.value(x)
def batch_transform(batch, net, device='cpu'):
"""
Transforming batch of data into training tensors
batch: (states, actions, rewards)
return: states variable, actions tensor, reference values variable
"""
REWARD_STEPS=1000
#create empty lists
states = []
actions = []
rewards = []
#list for index
not_done_idx = []
last_states = []
#loop over every experience step in a batch
for idx, exp in enumerate(batch):
#save triples (s,v,a)
states.append(np.array(exp.state, copy=False))
actions.append(int(exp.action))
rewards.append(exp.reward)
#check whether las state is given
if exp.last_state is not None:
not_done_idx.append(idx)
last_states.append(np.array(exp.last_state, copy=False))
#convering to FloatTensor
states_v = torch.FloatTensor(states).to(device)
actions_t = torch.LongTensor(actions).to(device)
# handle rewards
rewards_np = np.array(rewards, dtype=np.float32)
#if episode are not done apply network and collect rewards:
if not_done_idx:
last_states_v = torch.FloatTensor(last_states).to(device)
last_vals_v = net(last_states_v)[1]
last_vals_np = last_vals_v.data.cpu().numpy()[:, 0]
rewards_np[not_done_idx] += GAMMA ** REWARD_STEPS * last_vals_np
#
ref_vals_v = torch.FloatTensor(rewards_np).to(device)
return states_v, actions_t, ref_vals_v
!pip install tensorboardX
# import SummaryWriter to save results
#%load_ext tensorboard
from tensorboardX import SummaryWriter
GAMMA = 0.99
LEARNING_RATE = 0.005
ENTROPY_BETA = 0.01
BATCH_SIZE = 128
#will be doing some gradient clipping so as gradient wouldn't explode
CLIP_GRAD = 0.1
#we use CPU
device = torch.device('cpu')
#writing to tensorboardX
writer = SummaryWriter(comment="-lander-a2c_")
# creating function to iterate via environments
make_env = lambda: gym.make("LunarLander-v2")
#creating list of environments to train with
#envs = [make_env() for _ in range(50)]
envs = [make_env() for _ in range(10)]
#creating actor critic net
net = A2C(envs[0].observation_space.shape[0], envs[0].action_space.n).to(device)
print(net)
# creating agent with experience sourse as in REINFORCE that will
# run 10 steps in a row as in REINFORCE
agent = ptan.agent.PolicyAgent(lambda x: net(x)[0], apply_softmax=True, device=device)
exp_source = ptan.experience.ExperienceSourceFirstLast(envs, agent, gamma=GAMMA, steps_count=10)
#creating Adam agent
optimizer = optim.Adam(net.parameters(), lr=LEARNING_RATE, eps=1e-3)
batch = []
done_episodes = 0
step_idx = 0
total_rewards = []
#iterate of each step of environment until the last batch
for step_idx, exp in enumerate(exp_source):
batch.append(exp)
new_rewards = exp_source.pop_total_rewards()
#check whether episode ended since pop_total_rewards() outputs value only
#in this case
if new_rewards:
done_episodes += 1
reward = new_rewards[0]
total_rewards.append(reward)
# calculate mean reward per last 100 steps;
# episode can contain more but we assume
# that environment is solved if mean reward
# per 100 steps > 195
mean_rewards = float(np.mean(total_rewards[-100:]))
#writing to tensorboardX
writer.add_scalar("reward_100", mean_rewards, step_idx)
#check whether it is solved:
if mean_rewards > 195:
print("Solved in %d steps and %d episodes!" % (step_idx, done_episodes))
break
#we will use batch of size 128 for one iteration
if len(batch) < 128:
continue
states_v, actions_t, vals_ref_v = batch_transform(batch, net, device=device)
batch.clear()
# setting the gradients to zero before starting to do backpropragation
# because PyTorch accumulates the gradients on subsequent backward passes
optimizer.zero_grad()
#performing forward propagation
logits_v, value_v = net(states_v)
loss_value_v = F.mse_loss(value_v.squeeze(-1), vals_ref_v)
# finding probabilities for actions
log_prob_v = F.log_softmax(logits_v, dim=1)
# this is our Advantage value
adv_v = vals_ref_v - value_v.detach()
log_prob_actions_v = adv_v * log_prob_v[range(BATCH_SIZE), actions_t]
loss_policy_v = -log_prob_actions_v.mean()
#calculating probabilities in order to calculate our entropy loss for
prob_v = F.softmax(logits_v, dim=1)
entropy_loss_v = ENTROPY_BETA * (prob_v * log_prob_v).sum(dim=1).mean()
# calculate policy gradients only
loss_policy_v.backward(retain_graph=True)
grads = np.concatenate([p.grad.data.cpu().numpy().flatten()
for p in net.parameters()
if p.grad is not None])
# apply entropy and value gradients
loss_v = entropy_loss_v + loss_value_v
#doing backprop
loss_v.backward()
#performing gradient clipping so that there is no gradient explosion
#nn_utils.clip_grad_norm_(net.parameters(), CLIP_GRAD)
#update values of network parametes
optimizer.step()
# get full loss
loss_v += loss_policy_v
writer.close()
A2C(
(policy): Sequential(
(0): Linear(in_features=8, out_features=128, bias=True)
(1): ReLU()
(2): Linear(in_features=128, out_features=4, bias=True)
)
(value): Sequential(
(0): Linear(in_features=8, out_features=128, bias=True)
(1): ReLU()
(2): Linear(in_features=128, out_features=1, bias=True)
)
)
df_a2c = pd.read_csv('gdrive/My Drive/Reinforcement-Learning/lander-a2c-tag-reward_100.csv')
reinf_v3['mean_a2c'] = df_a2c['Value']
reinf_v3['steps_a2c'] = df_a2c['Step']
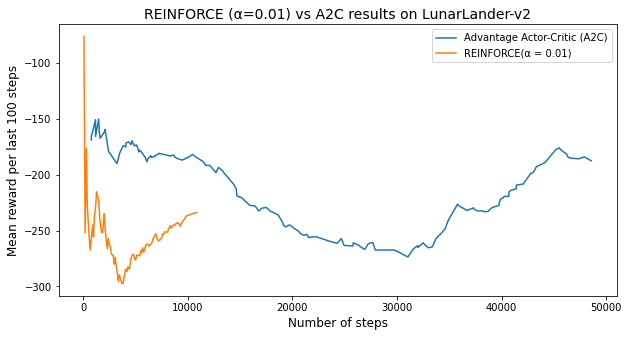
plt.figure(figsize=(10,5))
plt.plot(reinf_v3['steps_a2c'],reinf_v3['mean_a2c'])
plt.plot(reinf_v3['mean_0.01_steps'],reinf_v3['mean_0.01'])
plt.xlabel('Number of steps',fontSize=12)
plt.ylabel('Mean reward per last 100 steps',fontSize=12)
plt.legend(['Advantage Actor-Critic (A2C)','REINFORCE(α = 0.01)'])
plt.title('REINFORCE (α=0.01) vs A2C results on LunarLander-v2',fontSize=14)
plt.show()
You can download the notebook here.
![]()
Congratulations we have excuted an Atari Game with python and executed a Reinforcement Learning with Colab!
Leave a comment